绑定手机号
确认绑定









智猩猩公开课出品
策划:华严
目前,具身智能基础模型已取得显著进展,能够根据自然语言指令和视觉观察,生成可执行的动作,但其在真实世界中的部署应用却频繁失败。当前的通用模型仍存在两大局限:在空间维度上,存在“度量盲”的问题;在时间维度上,模型大多以开环方式进行预测,无法在闭环中持续自主调整。
为此,北京智源人工智能研究院提出最新一代通用具身大脑模型RoboBrain 2.5。该模型在原有RoboBrain的基础上,新增了机器人对三维空间结构的理解推理,和动作时序价值评估的能力,对下游任务执行成功率有显著提升。代码与模型现已开源。
RoboBrain 2.5采用统一的视觉—语言多模态融合架构,通过单一技术框架整合机器人感知、认知、推理与决策的全链条能力。其核心架构基于Transformer模型优化,专门针对具身场景的多源数据处理进行了底层调整。
论文链接:https://arxiv.org/pdf/2601.14352
项目主页:https://superrobobrain.github.io/
开源代码:https://github.com/FlagOpen/RoboBrain2.5/
在三维空间结构的理解与推理方面,智源研究院联合提出一个三维感知的多模态大模型RoboTracer。该模型通过全参数微调(SFT)强化空间信息的精准理解,并进一步用强化学习微调(RFT)提升推理与泛化能力,最终在开放世界场景中实现可用的 3D 空间轨迹生成。
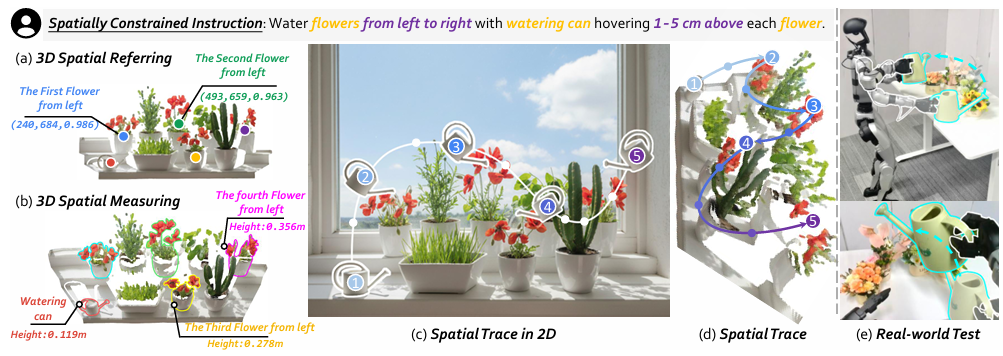
通过SFT训练下的RoboTracer在空间理解、空间度量、空间指代任务中达到了79.1%的平均成功率,实现SOTA性能。RoboTracer还可以灵活集成到不同类型的机器人上,如UR5机械臂、G1仿人机器人等,能够在真实环境中完成复杂、动态、多步骤任务,让机器人真正做到听得懂、看得清、动得准。
在动作时序价值评估方面,智源研究院联合提出最新成果机器人多巴胺Robo-Dopamine,通过步骤感知过程奖励模型,对每一个时间步的动作给出细致的价值评估,显著提高机器人对动作时序价值评估能力。
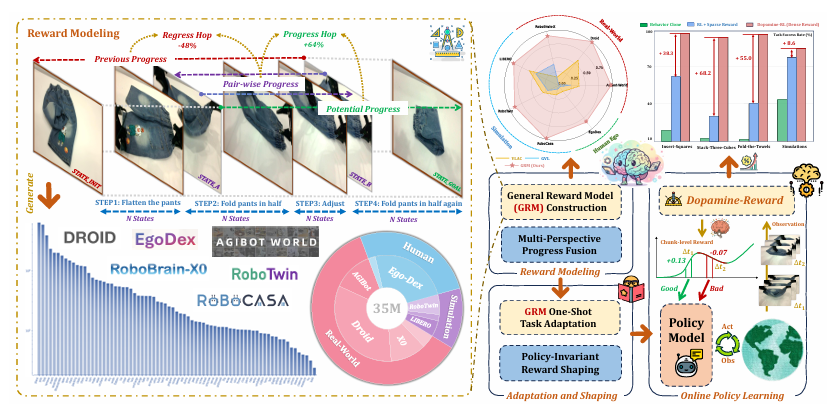
该团队提出从多视角输入中学习通用、具备步骤感知能力的过程奖励模型的新方法Dopamine-Reward。其核心是在超3,400小时/35M数据集上训练的通用奖励模型(GRM),该模型通过步骤奖励离散化实现结构化理解,并借助多视角奖励融合克服感知局限。
基于Dopamine-Reward,进一步构建Dopamine-RL这一鲁棒的策略学习框架,使机器人能够利用密集奖励进行高效自我优化,而不改变最优策略,从而从根本上避免语义陷阱。在面对精巧任务仅需一条演示数据,通过约1小时 (150 rollouts) 即可将成功率从0提升到95%以上。
1月28日20点,全新策划推出的「智猩猩×智源研究院具身智能技术公开课」第1期将开讲,由RoboBrain 2.5项目负责人、北京智源人工智能研究院具身智能大模型负责人王鹏伟主讲,主题为《通用具身大脑RoboBrain 2.5最新突破与演进》。

第1期信息
主 题: 《通用具身大脑RoboBrain 2.5最新突破与演进》
提 纲
1、具身大脑RoboBrain概述
2、新增3D空间推理能力RoboTracer解析
3、新增动作时序价值评估能力Robo-Dopamine
4、真机实验效果展示
5、总结与未来发展方向
主 讲 人 :王鹏伟,北京智源人工智能研究院具身智能大模型负责人,中国人民大学高领学院企业博士生导师,目前主要负责智源具身大脑大模型RoboBrain以及大小脑框架RoboOS,研究方向是具身智能、多模态大模型、深度学习、自然语言处理和机器学习等方向,曾就职于阿里巴巴达摩院以及快手科技大模型中台部门,主要负责大规模语音语义一体化等多模态交互系统以及多模态预训练项目,具有丰富的多模态大模型、文本大模型以及机器智能等产学经验。
直 播 时 间 :1月28日20:00
如何观看和学习
主讲人将于1月28日晚8点进行实时视频讲解和答疑互动,扫描或长按下方二维码,即可进入学习交流室,观看和学习本次公开课。
🎁邀请有礼:进入公开课学习交流室点击参加【邀请有礼活动】,可获得【精美礼品一份】。数量有限,先到先得!参与方式👇👇👇









