绑定手机号
确认绑定









AVP,全称Automated Valet Parking,中文名“自主代客泊车系统”。作为自动驾驶在泊车场景下的应用,AVP实现的是全自动代客泊车功能,最终目标是取代传统的人工代客泊车,帮助用户节省大量的停车时间,解决高峰期排队停车的痛点。
AVP作为当前泊车场景的功能天花板,涉及的细分场景复杂,技术难度大,并且对保证车辆安全性来说,也是巨大的挑战。因此,目前我们可以看到行业内已经有一些Demo演示版的AVP出现,但还没有量产的产品面世。
那么.代表当前自动泊车技术最高水平的AVP功能,它的原理和背后的关键技术是什么呢?难点在哪里?本文将给出详细解读,解开AVP的面纱。

图1 AVP宣传图
AVP功能原理
典型的AVP功能完整流程是:
(1)用户到达停车场入口或附近,通过手机端开启AVP 功能,用户可以离开车辆.去吃饭、逛街、开会等;
(2)车辆接收到AVP功能启用指令,自行进入停车场,在停车场中找到可用的车位,并停在车位上;
(3)用户需要用车的时候,通过手机端远程发出召唤,指定自己需要上车的位置。
(4)车辆接收到召唤指令后,自行离开停车位,驶出停车场,到达指定位置,用户上车。
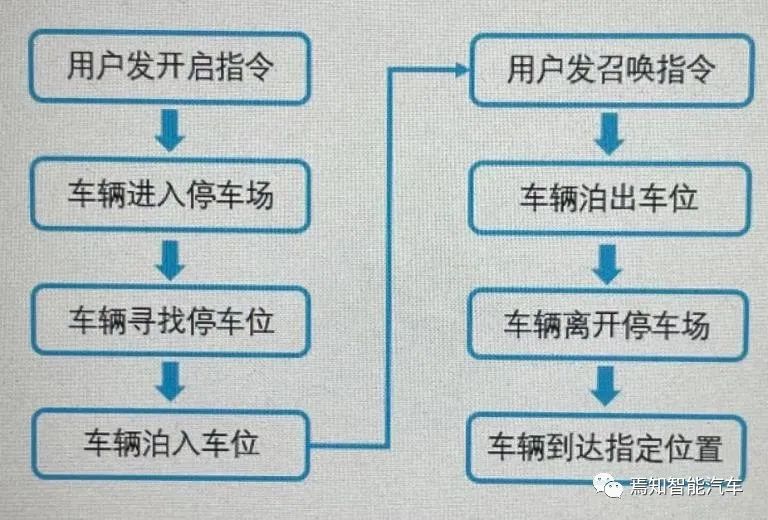
图2 AVP功能的全流程图示
从功能流程中可以看出,AVP的完整功能可以拆解为四项关键子功能:一是手机与车辆的互联:二是车辆在停车场内寻找车位;三是车辆自动泊入车位四是远程召唤车辆。
1.1 机-车互联
手机与车辆的互联,是AVP功能的基础,只有用户能离开车辆,并通过手机远程给车发指令,AVP 才能真正地给用户带来便捷。
要做到这一点并不困难,目前很多汽车都具备了手机智能互联与控制的功能,并有自家品牌专有的APP作为入口:典型案例如手机钥匙、车内温度控制,特斯拉的哨兵模式、智能召唉、小鹏的遥控泊车等。
那么,机-车互联的原理是什么呢?
手机与汽车互联的系统包括4个部分:车载控制器与网关,T-BOX,后台,手机APP
T-BOX是远程信息处理器的简称(Telematics BOX),主要用于车辆和后台系统及手机APP 通信,实现手机APP的车辆信息显示与控制。
当用户通过手机端APP 发送控制指令后,手机访问后台(一般是云端服务器),云端服务器将用户的指令传递到车载T-BOX,T-BOX再通过车辆总线(CAN/Ethemet)将指令传到对应的车载控制器。对于AVP功能,此处特指AVP功能的控制器。
操作层面上,手机端通过APP访问云端服务器,通过网络模块建立与车辆OBD和控制器的联系,从而激活AVP功能,控制车辆开始自主代客泊车模式:
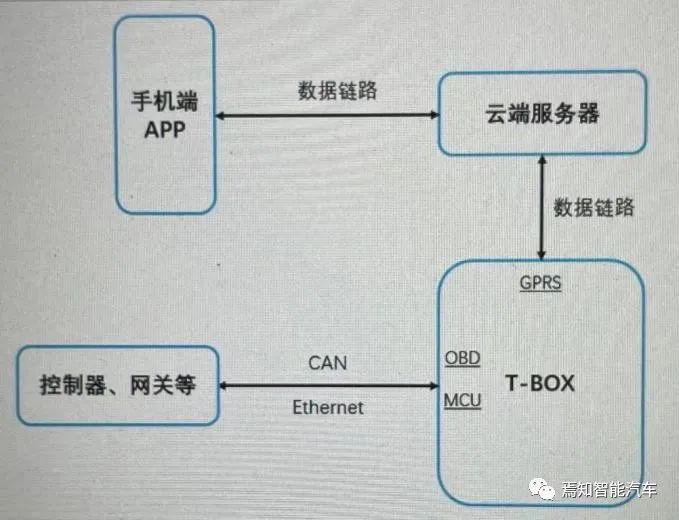
图3机-车互联系统的组成
1.2 寻找车位
进入停车场,并在停车场内自动寻找车位,是AVP功能的核心。在没有任何控制的情况下,车辆如何在停车场内自动、准确地寻找到可停的车位,是AVP的重点和难点。
目前寻找车位的方案有两种技术路线,一种是纯车端路线,即让车辆在停车场内边行驶边搜索车位,一旦搜索到可用的车位,就停下来准备泊入车位:另一种是车-场端结合的路线、即停车场内安装设备,将可用的车位信息和停车场内其他信息如障碍物等,发送给车辆,车辆将场端给定的车位作为终点,规划好行驶路径,直接开到终点。

图4 AVP寻找车位车端方案

图5 AVP寻找车位场端方案
在寻找车位的过程中,涉及到路径规划、车位识别、避障、字符识别等功能。
对于纯车端方案,路径规划即车辆自行规划搜索车位的前进路线,与传统的人工寻找车位思路一样,需要结合周边场景,边前进边规划;对于车-场端结合的方案,路径规划指规划从当前位置到目标停车位的路径,然后车辆直接按该路径行驶即可。
车位识别功能需要车辆能够自主识别各种类型的车位。通常会从不同的维度来划分车位类型,维度包括车位方向、车位标线、车位字符等等。

避障,是指车辆在寻找车位过程中,识别出周边所有的障碍物,并能及时通过加减速、转向或停车等工作,避开障碍物,确保安全、高效行驶。障碍物主要包括静态障碍物和动态障碍物,在车-场端结合的方案中,障碍物还可以由场端的设备.实时传输给车辆,提升避障的准确率和效率。
表2总结了常见的障碍物类型,车辆需要能够识别出这些常规障碍物。
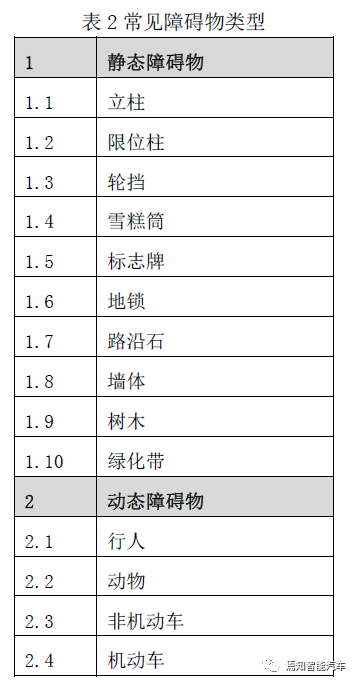
字符识别.是指车辆能够识别,在行驶过程中遇到的标识牌、地面、立柱等标注的字符,如直行与转向箭头、道路线、斑马线、车位号、特殊车位标识等,车辆需要通过这些字符标识,决策自己的行驶动作,并确认车位可用性。
1.3 泊入车位
寻找并确认车位后,开始自动泊入车位,这一过程与传统的自动泊车功能一样、通过规划泊入路径并控制车辆按路径倒车.完成泊入车位的工作。
1.4 召唤车辆
远程召唤车辆的全过程,是车辆自动泊车的相反过程。用户通过手机发出指令后,车辆自动从车位驶出,到达指定位置,完成AVP的全过程。
AVP关键技术
从AVP的基本原理可以看出,AVP功能的实现,涉及车联网、感知识别、同步定位、规划控制等多个领域,其中涉及的关键技术有高精地图、SLAM、融合感知、融合定位、路径规划等。
2.1 高精地图
高精地图又称高分辨率地图(HD Map.High Definition Map),是一种专门为无人驾驶服务的地图。对于AVP功能来说,高精地图主要指停车场的高精地图:通过格式化存储停车场内的各种交通要素,高精地图可以告知车辆完整的、高精度、精细化的停车场内部信息,包括高精度的坐标、准确的停车位、通道、立柱、标志牌、地面线等信息。
高精地图的绝对精度一般都会在亚米级,以高德地图为例,绝对精度可以达到10厘米以内,而且横向的相对精度往往还要更高。
可以说,高精地图存储了停车场的所有交通信息,是车辆规划行驶路径和定位的基础。目前国内可以提供高精地图的图商主要有高德、百度、四维图新等大厂。
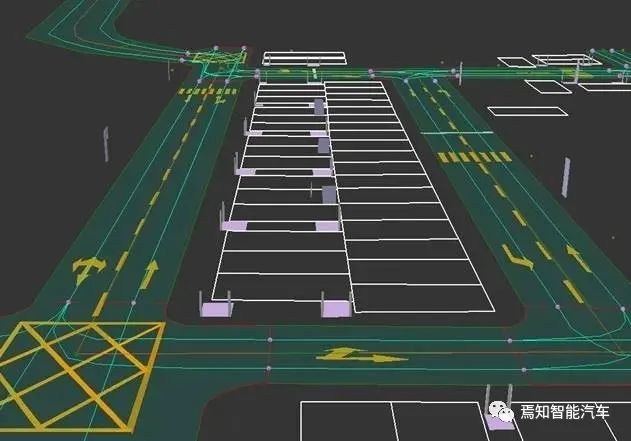
图6 高精地图
2.2 SLAM
SLAM全称SimultaneousLocalization And Mapping,即同步定位与建图技术。
SLAM是除高精地图外的另一种构建地图方法:车辆在一个初次到达的停车场中,一边移动,一边根据位置和环境感知的结果进行自身定位,同时在自身定位的基础上建造增量式地图,实现车辆的自主定位和导航。
目前的主流SLAM 主要靠视觉语义实现,即通过摄像头识别周围环境,经过语义分析,确认当前环境,并完成定位与建图。但随着激光雷达量产上车,激光SLAM或将成为新的主流。
2.3 融合感知
毫无疑问,环境感知是自动驾驶的重中之重,当然也是AVP的重难点。
众所周知,摄像头、毫米波雷达、激光雷达等不同类别的感知传感器,都存在各自的优势与不足,因此将多个传感器的感知结果进行融合,优势互补,可以提升感知的精度和准确度。
目前.多传感器融合已经成为自动驾驶的发展趋势。通过融合多种摄像头和雷达的感知结果,车辆可以更加精确地识别周边环境,并实现场景重构。
对于AVP来说、前视摄像头、侧视摄像头、环视摄像头、毫米波雷达、激光雷达、超声波雷达等传感器的感知结果,都可以进行融合处理。融合后的感知结果,将大大提升环境识别的效果。
2.4 融合定位
传统车辆的定位主要依赖于GNSS,即全球导航卫星系统,如GPS、北斗等。但GNSS的定位精度只有米级,无法满足自动驾驶的定位需求;同时对于AVP来说,地下车库中无法覆盖卫星信号、传统CNSS定位会失效。
因此、GNSS+IMU+SLAM的融合定位方式,是目前AVP 实现精准定位的不二之选。通过三者的信息融合,可以实现厘米级的定位精度,并且准确性也能得以保证。
另外,在车-场端结合的方案中,可以利用车-场互联,实现车辆在停车场内位置的实时同步,更进一步地提升了定位效果。
2.5 路径规划
此处的路径规划,特指车辆泊入车位时,规划泊车路线。
泊车路径规划是一个相对复杂的规划问题,涉及障碍物和车辆的轨迹预测、可行驶区域选择、局部轨迹规划和车辆控制等内容。
不同的规划算法,会得到完全不同的自动泊车效果,目前各路玩家仍在不断优化自己的泊车路径规划算法,以求达到更好的效果。
AVP的发展现状
从上文我们可以看出,AVP的愿景是美好的,但受限于当前的技术水平,距离完全意义上的量产AVP仍有一定的距离。
与目前已经量产的自动泊车功能相比,AVP是更高级别的自动泊车,可以认为:当前的自动泊车是AVP的基础。
目前的量产车型中,大部分车型都可以做到最基础的APA,即自动泊入泊出;小鹏、威马等新势力,也实现了简单的HPA即记忆泊车功能,HPA可以理解为AVP功能的过渡版,适用于单一、指定的停车场和停车位。
表3 各级自动泊车功能的现状
泊车功能 | 自动驾驶等级 | 适用场景 | 发展现状 |
APA 自动泊车 | L2 | 仅自动泊入车位 | 已基本普及 |
HPA 记忆泊车 | L3 | 固定停车场和停车位 | 个别玩家实现量产 |
AVP 代客泊车 | L4 | 任意停车场和可用的停车位 | Demo阶段,无量产 |
虽然 AVP 距离完全落地还有一段较长的路要走,但是作为点到点的自动出行中较为关键的起点和终点阶段,AVP是将各路玩家的必争之地。
从目前行业内的动态来看,大家都在为AVP的量产落地而努力着,相信随着关键技术的突破与成熟,AVP会在不久的将来,得到大规模普及和应用。








