绑定手机号
确认绑定









近期频频曝光的各种搭载激光雷达的车型,不得让人感叹国内各大车企研发节奏之迅速。
2022年作为激光雷达的「上车」元年,不仅有“蔚小理”为代表的造车新势力,还有以广汽埃安、长安为代表的老牌造车厂商都发布了他们搭载激光雷达的量产车型。
激光雷达的加入,让智能汽车的感知精度和环境适应性得到进一步提升。在面对光线多变、窄道通行以及异型或低矮障碍物等视觉难例场景时,激光雷达将发挥巨大作用,不仅有助于提升智能驾驶体验,更能保障行车安全。
这么多搭载了激光雷达的车型,它们的布置方式和技术亮点都不尽相同,如何才能从那些让人眼花缭乱的技术参数中找到真正关键的指标?
激光雷达怎么选?
第一代激光雷达及其特点
提到激光雷达,相信有很多的人会第一时间想到现在以无人驾驶出租车Robotaxi为商业模式的公司,他们所推出的自动驾驶车型,他们的最大特点就是在车顶加了一个激光雷达。如下所示:

机械旋转式激光雷达示意图
上图左侧的激光雷达是Velodyne公司生产的64线激光雷达,这个雷达是通过外壳带动激光实现扫描的,被称作机械旋转式激光雷达,原理类似于下图。机械旋转式激光雷达由于旋转时运动损耗较大,使用时间越长,精度会越来越低,因此寿命相对较短,目前Robotaxi厂家也基本不再使用。
机械旋转式激光雷达原理示意图
为了解决机械旋转式激光雷达的问题,激光雷达厂商对内部结构进行了优化,通过内部的转镜反射光线来实现扫描,被称作机械转镜式激光雷达,这样可以避免激光发射器运动所引起的问题。原理类似于下图:

机械转镜式激光雷达原理示意图
由于转镜式激光雷达的技术发展较早,目前市面上也有不少成熟的车规级产品供整车厂选择。像蔚来ET7上搭载的Innovsion激光雷达,小鹏P5搭载的Livox激光雷达其内部构造都属于机械转镜式激光雷达。
无论是机械旋转式激光雷达还是转镜式激光雷达,他们都需要电机驱动机械结构(激光收发元件或激光反射镜)来完成激光扫描。这种采用电机扫描架构的传统激光雷达,由于机械结构的原因,激光雷达的线束分布和点云的采集频率(10帧/秒)一般都是固定的。
作为一个自动驾驶工程师,我在实际使用第一代激光雷达的过程中遇到过一些困境。
很多激光雷达厂商虽然宣称最远距离能够探测到150米,但实际上,超过100米的点云由于过于稀疏不仅难以标注,在大多数情况下会被当做噪声被算法滤掉。
如下图所示,这是将激光雷达的点云通过坐标转换反投影到图像上,可以看到近处的车,点云数量还是很可观的,而稍远一点的车,上面的点云就依稀可见了。

维点云投影到2维图像示意图
此外还可以看到,每一条线束之间是有间隔的,越远的地方两条线束之间间隔越大,如果一些低矮目标(比如石块或倒地雪糕筒)刚好位于两个线束之间,即使车辆在运动,也很难稳定检测到,而这些低矮异形目标靠视觉感知又比较困难,很容易给驾驶带来安全隐患,这就是研发阶段Corner Case的来源。
第二代激光雷达如何破局?
面对以上困境,激光雷达厂商推出了第二代激光雷达。比如广汽集团的AION LX Plus使用的就是第二代激光雷达。
相比于很多车型的仅有正前方的激光感知范围,广汽在车顶布置了一个和摄像头做在同一个模组里的激光雷达,再配合在前轮毂上边缘的两个补盲激光雷达,实现300°的激光感知范围。如下图所示:
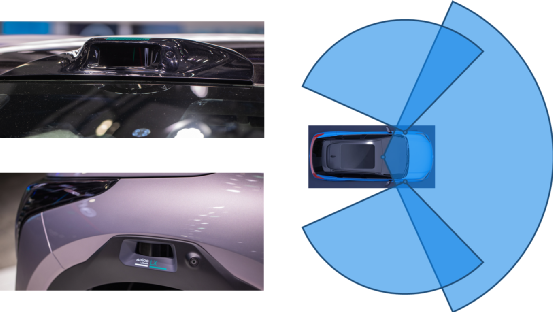
广汽埃安AION LX Plus激光雷达安装位置级感知范围示意图
第二代激光雷达与第一代激光雷达的最大区别是摒弃了原先的机械转镜式结构,通过一个高精度的MEMS微振镜来实现光路的反射,以此来完成激光的扫描,原理类似于下图:
MEMS微振镜反射激光示意图
MEMS微振镜的设计可以让使用者自主地改变光路传播的区域和频率,进而改变垂直分辨率和扫描帧率,这对解决智能驾驶中的Corener Case会有很大帮助。
破局之高速场景:可调垂直分辨率
MEMS微振镜相比于传统的机械转镜式结构更为灵活,可以通过编程来调节其反射角度,因此第二代激光雷达可以改变激光线束的分布,基于不同驾驶场景自由调节感兴趣区域(ROI,Region of Interest)区域的角度范围、垂直分辨率大小。
如下图所示,左边的扫描方式为等间距的激光扫描,而在自动驾驶中,对于天空或近处地面(对应的激光点云的上部和下部)是不太需要过多的激光扫描的,真正的ROI是道路。右图这种在特定区域(路面)上可调节激光线束密度的功能会更加适合自动驾驶系统,因为高速和低速所关注的ROI区域会有所不同。
下图为改变ROI垂直分辨率后同一个场景的相同目标的点云数量,可以看到分辨率调节为0.1°后(图中上半部分),相比调节前(图片下半部分)前方的车和人的点云数量都有一个比较大的提升。
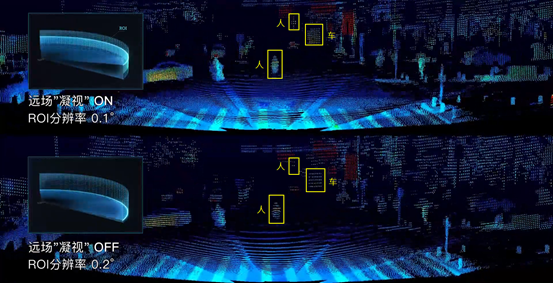
高分辨率(上)与普通分辨率(下)点云效果对比
调节ROI垂直分辨率的功能对于提升高速场景下的目标感知能力有很大帮助,尤其是正前方远处的行驶车辆以及雪糕筒、掉落的轮胎等常见的静态障碍物。提升高速场景下的感知距离可以让规划与控制系统有更多时间提前完成换道动作,提升智能驾驶的体验。
破局之城区场景:高帧率模式
除了在高速场景下改变垂直分辨率外,第二代激光雷达还能利用它的高帧率数据模式,提升低速场景,尤其是城区开放道路的智能驾驶体验。城区场景中,会遇到大量电瓶车穿行,旁车紧急加塞的场景,这些场景如果处理不及时,可能会遇到比较严重的擦碰。
大部分第一代激光雷达的帧率都是固定在10Hz(1秒扫描十次),第二代激光雷达的帧率可以提升至最高30Hz(1秒扫描三十次),这无疑能够极大降低感知的时延,获取更加及时的感知信息。如下动图所示,面对同一个场景,10Hz的采集频率与30Hz的采集频率在同一个窗口期的数据量对比。
普通帧率(左)与高帧率模式(右)数据量对比
我们知道激光雷达能够精确测量目标的位置,但无法直接测量目标的速度,速度都是通过多帧的位置偏差和时间间隔间接获取的。因此更高频的点云输入,可以估算出响应更为及时且更准确的速度,更快识别他车的细微动作(如加塞)和鬼探头等突发状况,提升城区场景下的智能驾驶能力。
可变垂直分辨率和高帧率模式的技术创新,很好地解决了第一代激光雷达固定点云形式和固定帧率的痛点,让汽车的智能驾驶系统无论在高速还是城区开放道路场景都能自主地选择模式,提升驾驶体验。
结语
最近网上出现了不少国内智能汽车只会“堆料”的言论,暗讽国产品牌汽车“堆料”只是在掩盖软件能力不足。我个人是不太认同这个观点的,我坚持认为“自动驾驶汽车的硬件决定了自动驾驶能力的上限”。如果一款车本身的硬件在理论上就很难处理某些Corner Case,为了安全就应该补充可以解决这些Corner Case的硬件,不然就是对消费者不负责的表现。
同样的道理,在选激光雷达时,应该选择技术更先进,上限高的激光雷达,选择搭载第二代激光雷达的厂商给国内的智能驾驶领域开了一个好头。