绑定手机号
确认绑定









此文讨论如何在低端的移动设备上提高模型性能,文章针对模型(不改变模型原有op情况下,不需要重新训练)和后处理两部分的优化开展讲解,若有不当之处,望批评指出!
此处的模型优化指的是我们常说的模型卷积层与bn层的融合或者conection,identity等结构重参化的操作,改想法来源于某天无意参与的一次讨论: 大佬的想法认为fuse是可以做的,但没那么必要,fuse(conv+bn)=CB的作用在于其他,而对于提速的作用微乎及微,不过本人更加坚持自己的观点,因为yolov5的对比是基于高算力显卡,低端卡,甚至无GPU,NPU加持的设备是有明显的提速作用。
大佬的想法认为fuse是可以做的,但没那么必要,fuse(conv+bn)=CB的作用在于其他,而对于提速的作用微乎及微,不过本人更加坚持自己的观点,因为yolov5的对比是基于高算力显卡,低端卡,甚至无GPU,NPU加持的设备是有明显的提速作用。
特别对于复用太多group conv或depthwise conv的模型,举个例子,shufflenetv2被当成是高效的移动端网络而被常常使用于端侧的backbone,我们看到单个shuffle block(stride=2)的组件就使用了两个深度可分离卷积: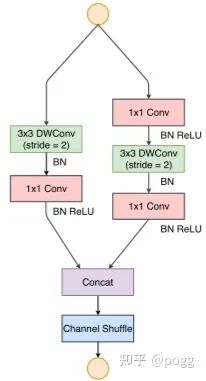 光是一整套网络就用了25组depthwise conv(原因在于shufflenet系列为低算力cpu设备设计,无可避免复用大量深度分离卷积)
光是一整套网络就用了25组depthwise conv(原因在于shufflenet系列为低算力cpu设备设计,无可避免复用大量深度分离卷积)
于是本着这样的初衷,做了一套基于v5lite-s模型的实验,并将测试结果贴出供大家相互交流: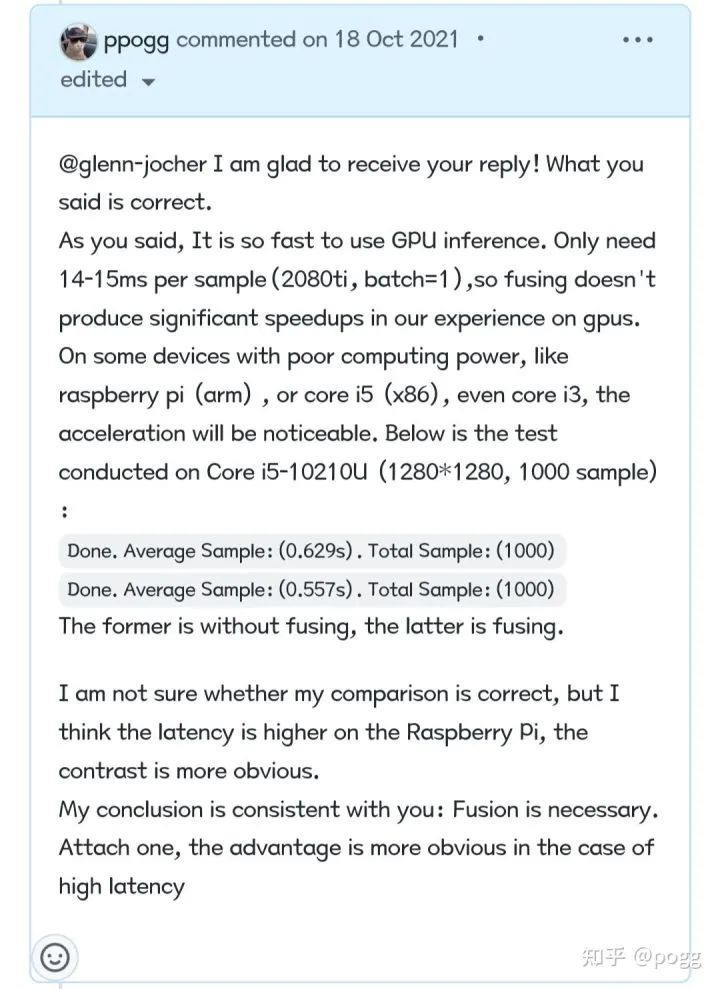
以上测试结果基于对shuffle block的所有卷积和bn层进行融合的结果,抽取coco val2017中的1000张图片进行测试,可以看到,在i5的核上,fuse后的模型在x86 cpu上单次向前的加速很明显。若是对于arm端cpu,效果会更加明显。
融合的脚本如下所示:
import torch
from thop import profile
from copy import deepcopy
from models.experimental import attempt_load
def model_print(model, img_size):
# Model information. img_size may be int or list, i.e. img_size=640 or img_size=[640, 320]
n_p = sum(x.numel() for x in model.parameters()) # number parameters
n_g = sum(x.numel() for x in model.parameters() if x.requires_grad) # number gradients
stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32
img = torch.zeros((1, model.yaml.get('ch', 3), stride, stride), device=next(model.parameters()).device) # input
flops = profile(deepcopy(model), inputs=(img,), verbose=False)[0] / 1E9 * 2 # stride GFLOPS
img_size = img_size if isinstance(img_size, list) else [img_size, img_size] # expand if int/float
fs = ', %.6f GFLOPS' % (flops * img_size[0] / stride * img_size[1] / stride) # imh x imw GFLOPS
print(f"Model Summary: {len(list(model.modules()))} layers, {n_p} parameters, {n_g} gradients{fs}")
if __name__ == '__main__':
load = 'weights/v5lite-e.pt'
save = 'weights/repv5lite-e.pt'
test_size = 320
print(f'Done. Befrom weights:({load})')
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = attempt_load(load, map_location=device) # load FP32 model
torch.save(model, save)
model_print(model, test_size)
print(model)
融合op的核心代码如下:
if type(m) is Shuffle_Block:
if hasattr(m, 'branch1'):
re_branch1 = nn.Sequential(
nn.Conv2d(m.branch1[0].in_channels, m.branch1[0].out_channels,
kernel_size=m.branch1[0].kernel_size, stride=m.branch1[0].stride,
padding=m.branch1[0].padding, groups=m.branch1[0].groups),
nn.Conv2d(m.branch1[2].in_channels, m.branch1[2].out_channels,
kernel_size=m.branch1[2].kernel_size, stride=m.branch1[2].stride,
padding=m.branch1[2].padding, bias=False),
nn.ReLU(inplace=True),
)
re_branch1[0] = fuse_conv_and_bn(m.branch1[0], m.branch1[1])
re_branch1[1] = fuse_conv_and_bn(m.branch1[2], m.branch1[3])
# pdb.set_trace()
# print(m.branch1[0])
m.branch1 = re_branch1
if hasattr(m, 'branch2'):
re_branch2 = nn.Sequential(
nn.Conv2d(m.branch2[0].in_channels, m.branch2[0].out_channels,
kernel_size=m.branch2[0].kernel_size, stride=m.branch2[0].stride,
padding=m.branch2[0].padding, groups=m.branch2[0].groups),
nn.ReLU(inplace=True),
nn.Conv2d(m.branch2[3].in_channels, m.branch2[3].out_channels,
kernel_size=m.branch2[3].kernel_size, stride=m.branch2[3].stride,
padding=m.branch2[3].padding, bias=False),
nn.Conv2d(m.branch2[5].in_channels, m.branch2[5].out_channels,
kernel_size=m.branch2[5].kernel_size, stride=m.branch2[5].stride,
padding=m.branch2[5].padding, groups=m.branch2[5].groups),
nn.ReLU(inplace=True),
)
re_branch2[0] = fuse_conv_and_bn(m.branch2[0], m.branch2[1])
re_branch2[2] = fuse_conv_and_bn(m.branch2[3], m.branch2[4])
re_branch2[3] = fuse_conv_and_bn(m.branch2[5], m.branch2[6])
# pdb.set_trace()
m.branch2 = re_branch2
# print(m.branch2)
self.info()
下图未进行fuse的模型参数量,计算量,以及单个shuffle block的结构,可以看到未融合的shuffle block中的单个branch2分支就包含了8个子op.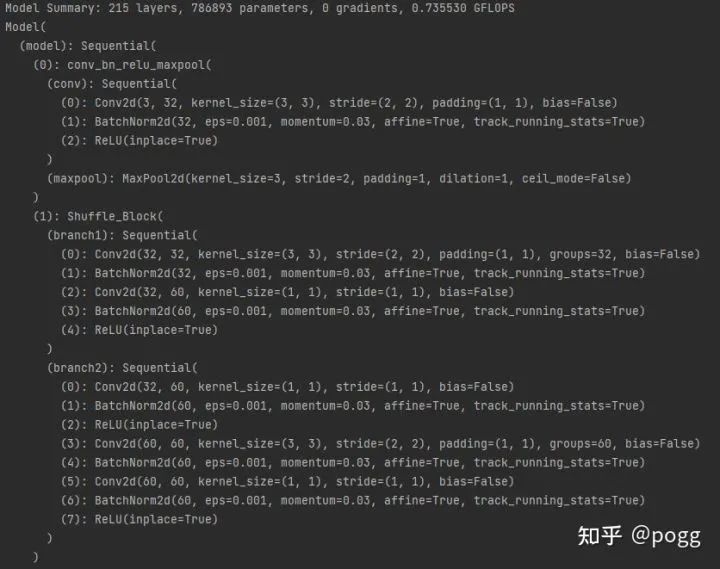 而融合后的模型参数量减少了0.5万,计算量少了0.6万,主要还是来源于bn层,并且可以看到单个branch2分支中的op减少了三个,整套backbone网络算下来共减少了25个bn层
而融合后的模型参数量减少了0.5万,计算量少了0.6万,主要还是来源于bn层,并且可以看到单个branch2分支中的op减少了三个,整套backbone网络算下来共减少了25个bn层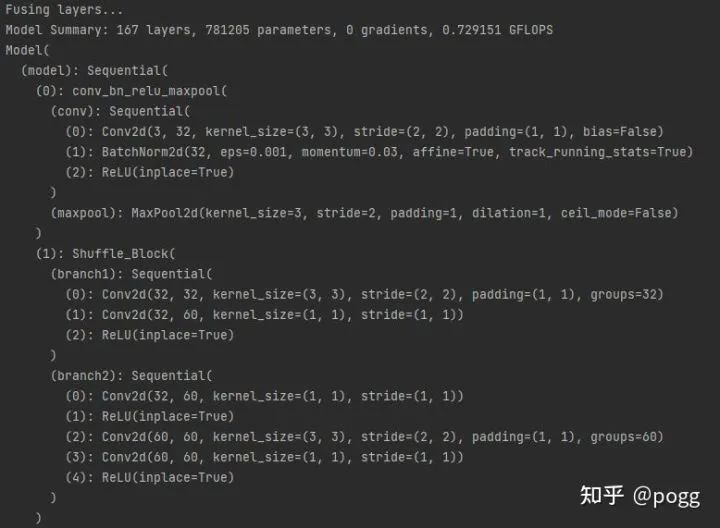
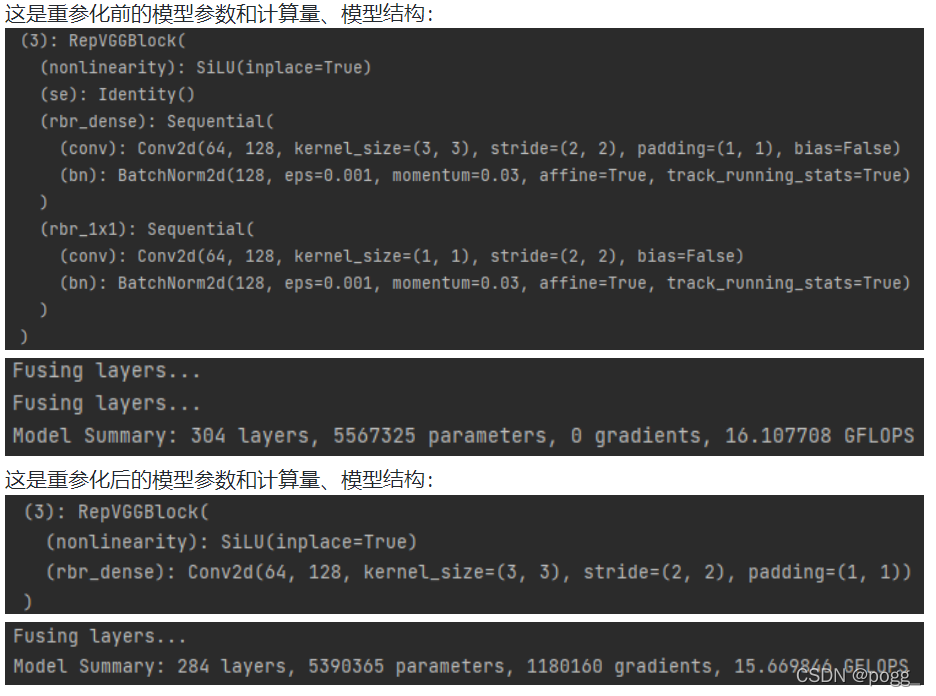
前言中提到的重参化操作之重要性更甚于op融合,引入前期提到的g模型:追求极致:Repvgg重参化对YOLO工业落地的实验和思考(https://zhuanlan.zhihu.com/p/410874403),由于g模型为高性能gpu涉及,backbone使用了repvgg,在训练时通过rbr_1x1和identity进行涨点,但推理时必须重参化为3×3卷积,才具有高性价比,最直观的,使用以下代码对每个repvgg block进行重参化和融合:
if type(m) is RepVGGBlock:
if hasattr(m, 'rbr_1x1'):
# print(m)
kernel, bias = m.get_equivalent_kernel_bias()
rbr_reparam = nn.Conv2d(in_channels=m.rbr_dense.conv.in_channels,
out_channels=m.rbr_dense.conv.out_channels,
kernel_size=m.rbr_dense.conv.kernel_size,
stride=m.rbr_dense.conv.stride,
padding=m.rbr_dense.conv.padding, dilation=m.rbr_dense.conv.dilation,
groups=m.rbr_dense.conv.groups, bias=True)
rbr_reparam.weight.data = kernel
rbr_reparam.bias.data = bias
for para in self.parameters():
para.detach_()
m.rbr_dense = rbr_reparam
# m.__delattr__('rbr_dense')
m.__delattr__('rbr_1x1')
if hasattr(self, 'rbr_identity'):
m.__delattr__('rbr_identity')
if hasattr(self, 'id_tensor'):
m.__delattr__('id_tensor')
m.deploy = True
m.forward = m.fusevggforward # update forward
# continue
# print(m)
if type(m) is Conv and hasattr(m, 'bn'):
# print(m)
m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
delattr(m, 'bn') # remove batchnorm
m.forward = m.fuseforward # update forward
"""
需要重参化后才能进行fuse操作,否则会出现重参化失败的情况
"""
下方结果可以直观看出模型层数、计算量和参数量都有明显变化,下图为重参化前后的模型参数和计算量、模型结构::
 在这里插入图片描述
在这里插入图片描述后处理的优化也同样重要,而后处理优化的目的在于减少低效率循环或判断语句,避免大量使用昂贵算子等。
我们使用yolov5基于ncnn demo的代码进行测试和修改,但由于源码链接太多库,我们单抽general_poprosal函数,仿造general_poprosal函写一段使用sigmoid计算confidence再比对80类,计算bbox坐标的操作。
float sigmoid(float x)
{
return static_cast<float>(1.f / (1.f + exp(-x)));
}
vector<float> ram_cls_num(int num)
{
std::vector<float> res;
float a = 10.0, b = 100.0;
srand(time(NULL));//设置随机数种子,使每次产生的随机序列不同
cout<<"number class:"<<endl;
for (int i = 1; i <= num; i++)
{
float number = rand() % (N + 1) / (float)(N + 1);
res.push_back(number);
cout<<number<<' ';
}
cout<<endl;
return res;
}
int sig()
{
int num_anchors = 3;
int num_grid_y = 224;
int num_grid_x = 224;
float prob_threshold = 0.6;
std::vector<float> num_class = ram_cls_num(80);
clock_t start, ends;
start = clock();
for (int q = 0; q < num_anchors; q++)
{
for (int i = 0; i < num_grid_y; i++)
{
for (int j = 0; j < num_grid_x; j++)
{
float tmp = i * num_grid_x + j;
float box_score = rand() % (N + 1) / (float)(N + 1);
// find class index with max class score
int class_index = 0;
float class_score = 0;
for (int k = 0; k < num_class.size(); k++)
{
float score = num_class[k];
if (score > class_score)
{
class_index = k;
class_score = score;
}
}
float prob_threshold = 0.6;
float confidence = sigmoid(box_score) * sigmoid(class_score);
if (confidence >= prob_threshold)
{
float dx = sigmoid(1);
float dy = sigmoid(2);
float dw = sigmoid(3);
float dh = sigmoid(4);
}
}
}
}
ends = clock() - start;
cout << "sigmoid function cost time:" << ends << "ms" <<endl;
return 0;
}
此处耗时:
number class:
0.65 0.08 0.62 0.33 0.79 0.7 0.44 0 0.96 0.75 0.92 0.66 0.54 0.23 0.14 0.75 0.94 0.88 0.76 0.81 0.28 0.37 0.34 0.19 0.46 0.93 0.79 0.86 0.64 0.55 0.84 0.91 0.33 0.53 0.71 0.53 0.69 0.63 0.67 0.35 0.24 0.97 0.94 0.91 0.66 0.63 0.14 0.4 0.28 0.24 0.29 0.2 0.58 0.65 0.51 0.79 0.49 0.47 0.94 0.84 0.38 0.84 0.88 0.61 0.99 0.17 0.02 0.02 0.42 0.96 0.48 0.6 0.08 0.33 0.84 0.04 0.8 0.22 0.16 0.57
sigmoid function cost time:68ms
修改一下函数,先使用sigmoid的反函数unsigmoid计算prob_threshold,此时就不需要先遍历80个类寻找最高得分的类,也不会遇到切入第三个for循环后一定要进行两次sigmoid操作(计算confidence)的问题,只有当box_score > unsigmoid(prob_threshold)才会进行80类的max score查找,再计算bbox坐标,confidence等信息。
float unsigmoid(float x)
{
return static_cast<float>(-1.0f * (float)log((1.0f / x) - 1.0f));
}
int unsig()
{
int num_anchors = 3;
int num_grid_y = 224;
int num_grid_x = 224;
float prob_threshold = 0.6;
std::vector<float> num_class = ram_cls_num(80);
un_prob = unsigmoid(prob_threshold)
clock_t start, ends;
start = clock();
for (int q = 0; q < num_anchors; q++)
{
for (int i = 0; i < num_grid_y; i++)
{
for (int j = 0; j < num_grid_x; j++)
{
float tmp = i * num_grid_x + j;
float box_score = rand() % (N + 1) / (float)(N + 1);
// find class index with max class score
if (box_score > un_prob )
// 此处先用sigmoid的反函数绕过两次sigmoid,同时将前面的80类对比放至判断后面,不符合条件则不进行
{
int class_index = 0;
float class_score = 0;
for (int k = 0; k < num_class.size(); k++)
{
float score = num_class[k];
if (score > class_score)
{
class_index = k;
class_score = score;
}
}
float confidence = sigmoid(box_score) * sigmoid(class_score);
if (confidence >= prob_threshold)
{
float dx = sigmoid(1);
float dy = sigmoid(2);
float dw = sigmoid(3);
float dh = sigmoid(4);
}
}
}
}
}
ends = clock() - start;
cout << "unsigmoid function cost time:" << ends << "ms" <<endl;
return 0;
}
结果如下:
number class:
0.65 0.08 0.62 0.33 0.79 0.7 0.44 0 0.96 0.75 0.92 0.66 0.54 0.23 0.14 0.75 0.94 0.88 0.76 0.81 0.28 0.37 0.34 0.19 0.46 0.93 0.79 0.86 0.64 0.55 0.84 0.91 0.33 0.53 0.71 0.53 0.69 0.63 0.67 0.35 0.24 0.97 0.94 0.91 0.66 0.63 0.14 0.4 0.28 0.24 0.29 0.2 0.58 0.65 0.51 0.79 0.49 0.47 0.94 0.84 0.38 0.84 0.88 0.61 0.99 0.17 0.02 0.02 0.42 0.96 0.48 0.6 0.08 0.33 0.84 0.04 0.8 0.22 0.16 0.57
unsigmoid function cost time:77ms
貌似姿势不对,我们调高prob_threshold=0.6,得到新的结果:
sigmoid function cost time:69ms
unsigmoid function cost time:47ms
此时可以看到收益,不断调高阈值,unsigmoid函数耗时越短,但取而代之的是目标都被过高的阈值卡断,函数后半部分无法进行。从而可以看出,使用反函数计算可以绕过两次sigmoid的指数操作(计算confidense),但是否使用此种方法还是需要根据实际业务分析,倘若目标的box_score都偏低,那么这种优化只会变成负优化。
倘若后处理存在大量for循环,且循环不存在数据依赖和函数依赖关系,可以考虑使用openml库进行多线程并行加速,比如查找80类中score最高的类:
#pragma omp parallel for num_threads(ncnn::get_big_cpu_count())
for (int k = 0; k < num_class; k++) {
float score = featptr[5 + k];
if (score > class_score) {
class_index = k;
class_score = score;
}
}
或者多线程计算每个目标的位置信息:
#pragma omp parallel for num_threads(ncnn::get_big_cpu_count())
for (int i = 0; i < count; i++) {
objects[i] = proposals[picked[i]];
// adjust offset to original unpadded
float x0 = (objects[i].rect.x) / scale;
float y0 = (objects[i].rect.y) / scale;
float x1 = (objects[i].rect.x + objects[i].rect.width) / scale;
float y1 = (objects[i].rect.y + objects[i].rect.height) / scale;
// clip
x0 = std::max(std::min(x0, (float) (img_w - 1)), 0.f);
y0 = std::max(std::min(y0, (float) (img_h - 1)), 0.f);
x1 = std::max(std::min(x1, (float) (img_w - 1)), 0.f);
y1 = std::max(std::min(y1, (float) (img_h - 1)), 0.f);
objects[i].rect.x = x0;
objects[i].rect.y = y0;
objects[i].rect.width = x1 - x0;
objects[i].rect.height = y1 - y0;
}
但ncnn的底层源码就已经实现了并行计算,因此无加速作用,但可记作一种方法供以后使用。
经过以上修改后的模型检测效果如下:
xiaomi 10+CPU(Snapdragon 865):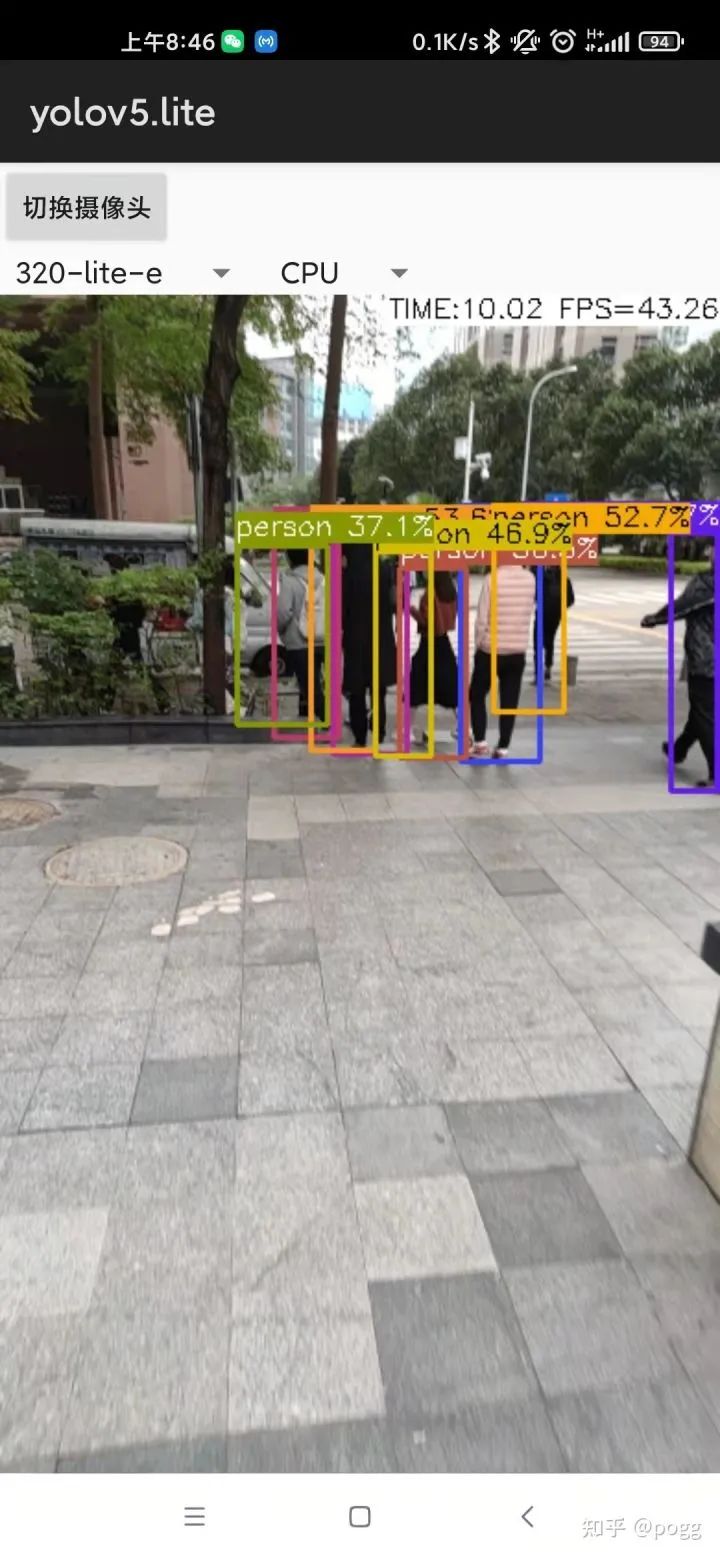 redmi K30+CPU(Snapdragon 730G):
redmi K30+CPU(Snapdragon 730G): 代码链接:https://github.com/ppogg/ncnn-android-v5lite
代码链接:https://github.com/ppogg/ncnn-android-v5lite
Welcome star and fork~









