绑定手机号
确认绑定









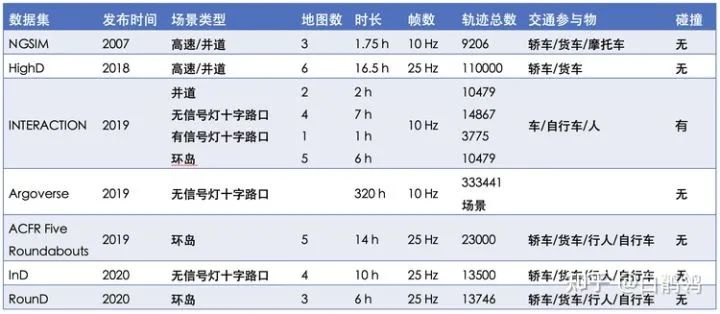
车辆轨迹在驾驶决策模型的设计、训练、验证方面都有很重要的作用。目前已开源的轨迹数据集汇总如下:
先说结论:
INTERACTION质量最好,但是申请略长。
HighD,inD,RounD,ACFR Five Roundabouts 数据量很足,但是缺地图。
Argoverse能用,数据预处理自己看着办吧。
NGSIM更适合交通流分析,决策任务没法用。
等我论文写完来发INTERACTION,HighD,InD,RounD的数据,还有HighD,InD,RounD的地图。
NGSIM
NGSIM数据集下载与格式说明
美国交通局于2007年推出的轨迹数据集,路边摄像头采集。主要包括了高速,城市中多个十字路口的场景。轨迹是分段的,也可以拼接起来。总计7段15分钟的数据,数据分析的文件很详细,大家可以自行下载研究。官方没有提供地图。反而是近期德国的一个地图格式处理库CommonRoad在场景库中提供了CommonRoad格式的地图。
从车辆位置标注的思路可以看出NGSIM主要是为交通流分析服务的,没有具体的车头朝向数值,而是通过道路编号表示。换言之,地图没标号就不要想搞清楚车头怎么放的。
由于数据体量不大,但预处理耗时耗力,不是很推荐。
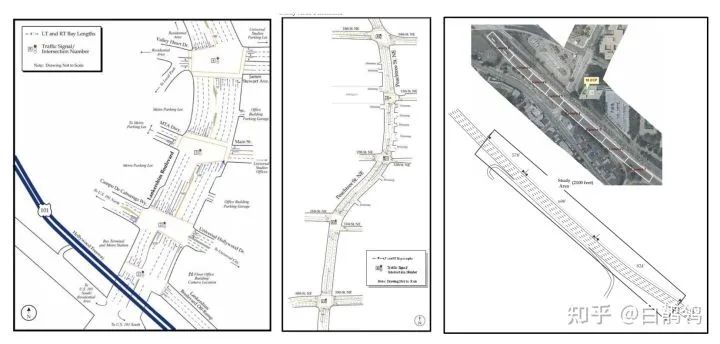 INTERACTION的三张地图(来自官方的数据分析)
INTERACTION的三张地图(来自官方的数据分析)HighD
HighD数据申请界面
HighD数据格式说明
德国亚琛大学的LevelX数据集的高速场景部分,需要申请使用,链接有时限,申请者不可公开传播。申请批准周期大约是一周左右。就数据体量和质量而言还是值得的。
总计采样6个地点,都在亚琛附近的高速公路,都是无人机采集,每段约410m。16.5小时,110000+条轨迹,25Hz的采样频率。
HighD的数据格式和后续推出的InD,RounD有细微的不同,它的坐标系原点起始于左上方,标注车辆位置用的也是包围盒左上方端点而非中心点。
德国的高速公路是不限速的,所以你可以看到200km/h的车呼啸而过。
没有提供地图,需要的朋友可以私戳我,标注了Lanelet2格式的地图,如果需要的人多我会开一个Github仓库放上去。
 HighD采样地点
HighD采样地点INTERACTION
INTERACTION Database
美国加州伯克利大学提供的数据集。需要申请使用,链接只有一次有效!!!申请者不可公开传播。初次申请批准周期大约是一周左右,我当时第一次打开链接没下载,火速发了邮件要了第二次链接,回复是三天之内到的。数据非常多样化,体量也很大,除了下载规则太变态以外,还是很推荐的。
包括了中国,美国,德国,保加利亚的并道、十字路口、环岛场景。总计12张地图,官方提供了Lanelet2格式的,已标注交通规则已对齐。其他细节见文章开头表格。10Hz的采样频率。
DR开头的数据为无人机采集,TC则是路边摄像头,TC开头的那个场景也是唯一的有信号灯十字路口场景。
非常良心,做决策任务的话,几乎不需要任何额外的数据预处理。
没有对道路进行编码说明,而是简单地通过坐标系对照地图,可能是专门为驾驶决策仿真做的,交通流研究可能不是很友好?
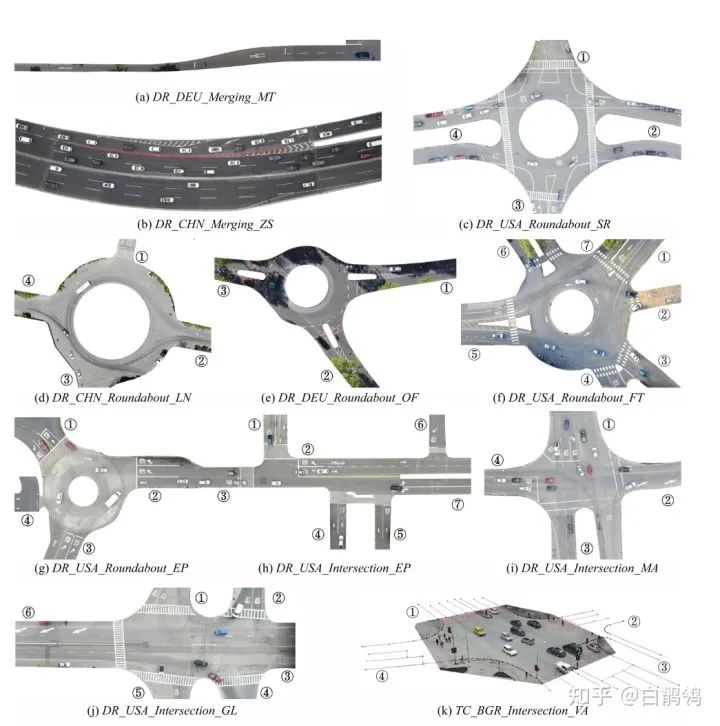 INTERACTION所有场景
INTERACTION所有场景Argoverse
Argoverse官网
美国Argo AI X CMU采集的数据集,直接官网下载即可。
Argoverse 1包括了320小时的数据,人为划分成了323 557个5秒的场景。对交通参与物的品种划分比较迷惑。10Hz的采样频率。
Argoverse 2包括了763小时的数据,人为划分成了250 000个11秒的场景。交通参与物共10种。10Hz的采样频率。
可能只适用于动作预测任务。因为对于决策模型的训练,最大步长会受到限制。
地图没找到下载方式,好像是只提供了接口。
ACFR Five Roundabouts
Rounadabouts下载界面
澳大利亚悉尼大学采集的数据集,直接官网下载即可。
一共五个环岛地点,数据车采集,14个小时,25Hz的采样频率。没有提供官方标注&对齐的地图。
RounD数据集的拉踩原话:“没有考虑行人。采样感知域小,所以没有考虑侧边车辆进入环岛的过程。激光雷达出现了一些问题,轨迹标定可能很不精准”。谢谢RounD,让我失去了检查数据的欲望。
一定要用的话应该可以用来做驾驶决策。
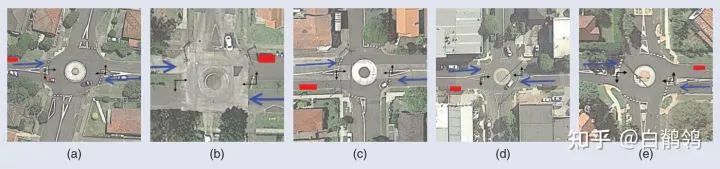 Five Roundabouts 所有场景
Five Roundabouts 所有场景InD
InD数据申请界面
InD数据格式说明
德国亚琛大学的LevelX数据集的无信号灯十字路口部分,需要申请使用,链接有时限,申请者不可公开传播。
总计采样4个地点,都在亚琛附近,无人机采集。总计10小时,13500+条轨迹,25Hz的采样频率。
提供了lanelet2格式的地图,对齐过,但是标的不是很详细。CommonRoad提供了一个修正版,我这边也做了修正和延展,之后会放Github的。
 InD所有场景
InD所有场景RounD
RounD数据申请界面
RounD数据格式说明
德国亚琛大学的LevelX数据集的环岛部分,需要申请使用,链接有时限,申请者不可公开传播。
总计采样3个地点,都在亚琛附近,无人机采集。总计6小时,13700+条轨迹,25Hz的采样频率。
提供了lanelet2格式的一张(?)地图,可能是因为另外两张对应的轨迹数据太少没标?我做了标记、对齐和延展的版本,之后会放Github的。
感谢LevelX系列提供的对其他数据集的评价,我愿称LevelX官方数据文档为拉踩之王。
 rounD所有场景
rounD所有场景TJRD
中国同济大学推出的轨迹数据集,供公开下载的部分很小。受限于相关法律法规,需要签订一系列很长的保密协议后才可以使用。