绑定手机号
确认绑定









近一年来激光雷达在车圈非常火,光是宣称自己的产品是“世上首款搭载激光雷达的量产车”的就至少有小鹏(P5)和极狐(阿尔法S),沙龙汽车更是打出了“4颗以下,请别说话”的宣传语(沙龙机甲龙搭载4颗激光雷达)。

激光雷达技术是激光探测与测距系统的简称,通过测定传感器发出的激光在传感器与目标物体之间的传播距离,分析目标地物表面的反射能量大小、反射波谱幅度、频率和相位等信息,进行目标定位信息的精确解算,从而呈现目标物精确的三维结构信息。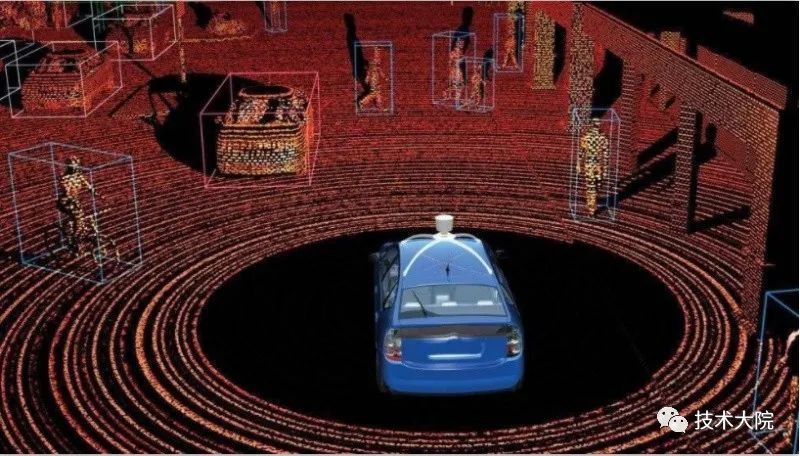
激光雷达被称为探测“眼睛”,是一种通过发射激光来测量物体与传感器之间精确距离的主动测量装置。激光雷达的应用可以分成四个阶段:
1960-2000诞生与科研应用阶段,全球第一台激光器诞生于1960年
早期激光雷达主要用于科研及测绘项目,进行气象探测以及针对海洋、森林、地表地形测绘
二十世纪八九十年代,扫描结构的引入扩大了激光雷达的范围并拓展了其应用领域,激光雷达商用产品如激光开始起步
2000-2015商业化与车载应用初期:激光雷达从单线扫描的架构逐渐发展到多线扫描,它对环境3D高精度重建的应用优势被逐渐认可
2004年开始的DARPA大赛推动了无人驾驶技术的快速发展并将激光雷达引入了无人驾驶
2005年Velodyne推出的机械旋转式激光雷达在第二届DARPA挑战赛中到关注,第三届DARPA完赛的6支队伍中的5支都搭载了Velodyne生产的激光雷达
随后陆续有巨头科技公司及新兴无人驾驶公司投入无人驾驶技术究,激光雷达被广泛应用于无人驾驶测试项目
2016-2019无人驾驶应用蓬勃发展,国内激光雷达厂商纷纷入局,技术赶超国外厂商
激光雷达技术方案呈现多样化发展趋势,开始有无人驾驶车队行小范围商业化试点
在高级辅助驾驶(ADAS)和服务机器人领域的应用也不断发展
2019年至今技术优化引领上市热潮,激光雷达向芯片化、阵列化发展
2020年,境外激光雷达公司迎来通过SPAC的上市热潮,有华为、大疆等巨头公司跨界加入激光雷达市场竞争
2021年被称为激光雷达量产元年
激光雷达本质上是激光探测和测距,是一种主动传感器,所形成的数据是点云形式,其工作原理为:
向被测目标发射一束激光
测量反射或散射信号到达发射机的时间、信号强弱程度和频率变化等参数
确定被测目标的距离、运动速度以及方位
表面上它只是发射并接收光束,实际上它获取的是物体的点云数据(坐标系里的数据集合)。除了X/Y/Z坐标外,每个数据点包含的信息还有颜色、反射强度等等。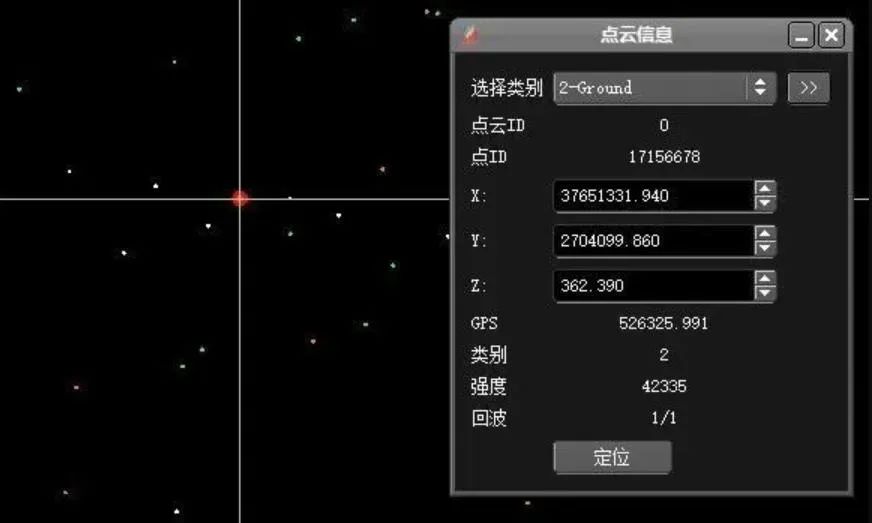 通过这些点云,人们不仅可以明确了解某个点的坐标信息,还可以计算它们之间的长度、面积、体积、角度等信息。感知到与物体之间的距离、角度等信息后,基于这些信息,进而通过软件算法去做 3D 建模,通过分析激光信号描绘三维点云图,实现环境实时感知及避障功能。
通过这些点云,人们不仅可以明确了解某个点的坐标信息,还可以计算它们之间的长度、面积、体积、角度等信息。感知到与物体之间的距离、角度等信息后,基于这些信息,进而通过软件算法去做 3D 建模,通过分析激光信号描绘三维点云图,实现环境实时感知及避障功能。
 基于这些信息,系统能对周边环境进行准确的3D建模,这个模型有利于智能驾驶系统对车辆进行精确定位,有利于避免车辆和周边物体发生碰撞。
基于这些信息,系统能对周边环境进行准确的3D建模,这个模型有利于智能驾驶系统对车辆进行精确定位,有利于避免车辆和周边物体发生碰撞。
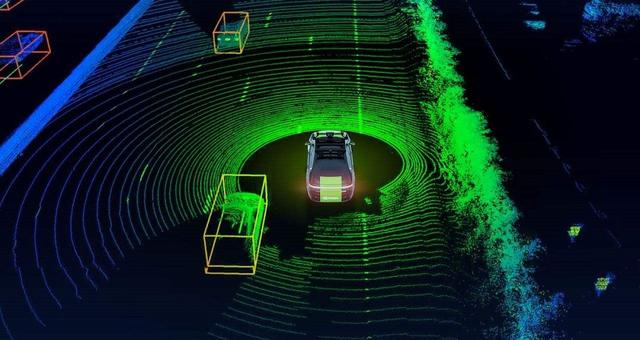
如果简单理解来说,大概就是激光雷达扫描过去以后,对于附近环境情况会有个上帝视角的立体图在车的“脑子”里。
除此之外,还可以测出大气中肉眼看不到的微粒的动态等情况。激光雷达的作用就是精确测量目标的位置(距离与角度)、形状(大小)及状态(速度、姿态),从而达到探测、识别、跟踪目标的目的。

在车辆上支撑自动驾驶的场景需要哪些技术?
传感技术,就是我们把周围环境的数据采集回来
计算技术,当你要做分析就要做计算,这就需要计算的一个过程
算法和数据技术,我们拿到大量数据,需要用算法来做分析做判断,我们实际上就是要做感知、做计算、做算法
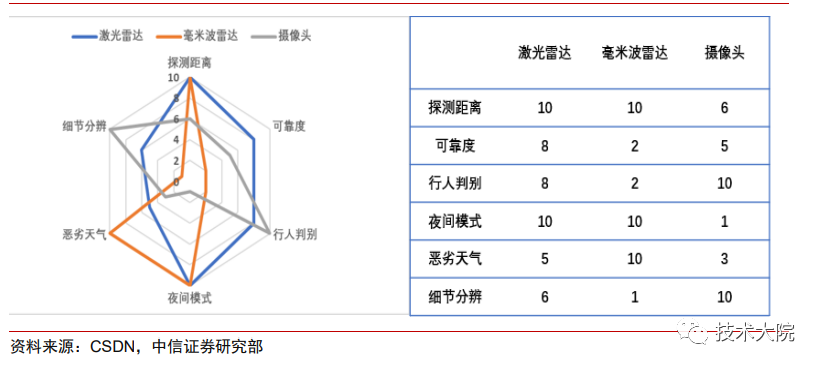
自动驾驶的环境监测传感器主要包括摄像头和雷达两类:
摄像头通过图像识别技 术实现距离测量、目标识别等功能,按视野覆盖位置可分为:
前视:可以实现车道偏离警示系统(LDW)、前向碰撞预警系统(FCW)、 行人识别警示(PCW)
环视(侧视+后视)
内视摄像头
雷达利用发射波和反射波之间的时间差、相位差 获得目标物体的位置和速度等数据,按所使用的不同类型的波,雷达可以分为:
毫米波雷达:介于微波和红外线之间,频率范围 10GHz —200GHz,波长为毫米级
激光雷达:介于红外线和可见光之间,频率大致为 100000GHz,波长为纳米级
超声波雷达:频率高于 20000Hz
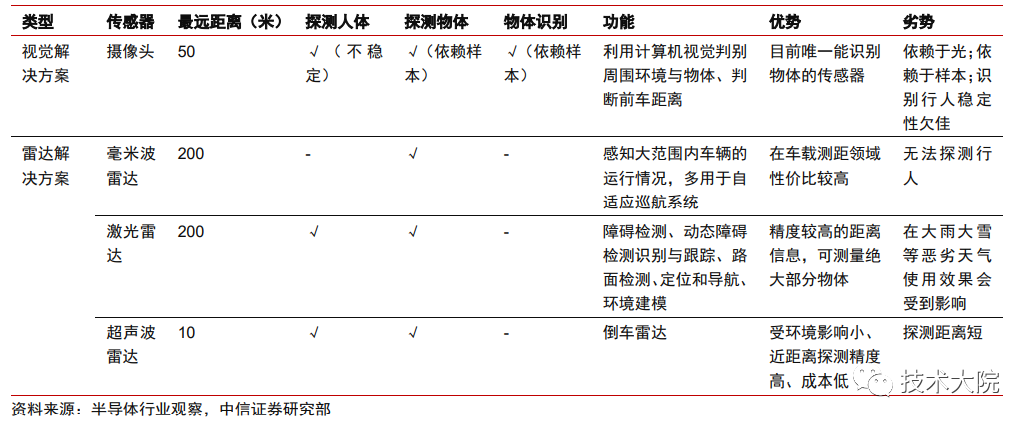
对于自动驾驶传感器的选择,目前市场上存在着两种不同路径:
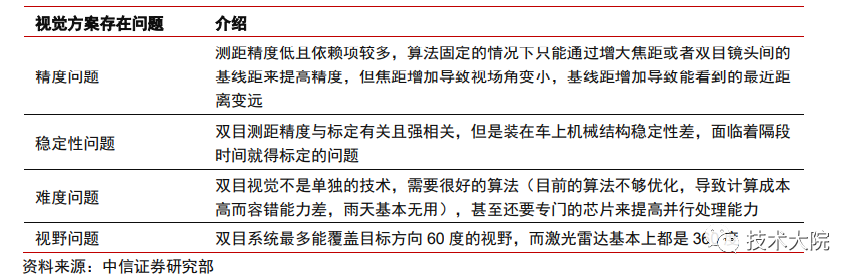
一种是由摄像头主导、 配合毫米波雷达等低成本元件组成,构成纯视觉计算,典型代表为特斯拉、Mobileye 和 国内唯一自动驾驶纯视觉城市道路闭环解决方案--百度 Apollo Lite
另一种是由激光雷达 主导,配合摄像头、毫米波雷达等元件组成,典型代表为谷歌 Waymo、国内的华为、百度 Apollo (除 Apollo Lite)、 Pony.ai、文远知行等主流自动驾驶厂商。
以特斯拉为代表的纯视觉方案容易受光照、雨雾、遮挡等因素限制,从而使视野 范围受限。对于以主流自动驾驶厂商为代表的激光雷达拥护者,系统的安全可靠性排在首 位,实现这一方向的方式就是融合各个性能的传感器,以弥补不同类型的技术漏洞,采用 激光雷达的自动驾驶厂商一般选择在车顶配置 64 线激光雷达,用于障碍物和移动车辆检 测,同时在车四周环绕成本相对较低的低线束激光雷达或毫米波雷达进行视野补充。
与以摄像头为主传感器的自动驾驶方案“轻感知、重计算”相比,以激光雷达为主传 感器的自动驾驶方案最明显的特征是“重感知、轻计算”,“堆叠激光雷达”的方案会适 当降低感知数据处理环节对运算能力的要求,从而加快 L4 级自动驾驶汽车商业化部署进 程。所以尽管目前安装激光雷达会大幅提高传感器方案成本,但对于安全可靠性要求极高 的 L4 来说,激光雷达不可或缺,以成本换安全将会是一个更优的选择。

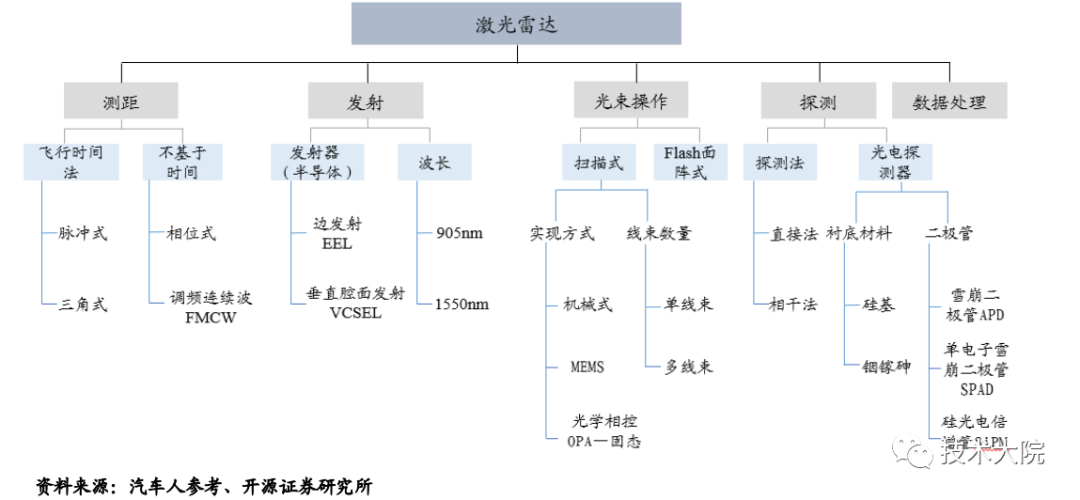
要想弄清楚纷繁复杂的激光雷达技术,最主要抓住两点:
成像
机械式
MEMS
OPA(光学相控阵)
Flash
测距技术
脉冲
FMCW(频率调制连续波)
相位式测距
在当前的市场上,我们可以看到:
机械式激光雷达:生产成本居高不下、寿命较短,难以面向前装量产
MEMS方案:尚存技术缺陷,过车规难度较高
混合固态激光雷达可以分为转镜式、棱镜式与微振镜式(MEMS)。其中,因工 作过程中,内部扭杆需同时快速反向扭动,扭杆极易断裂,使用寿命短暂,MEMS激光雷达过车规难度明显提升
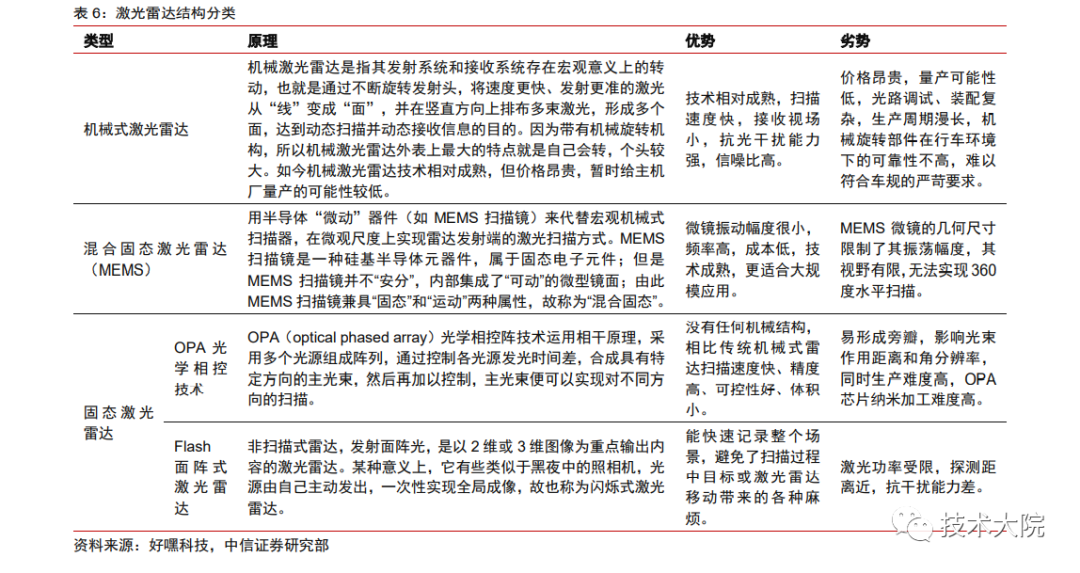
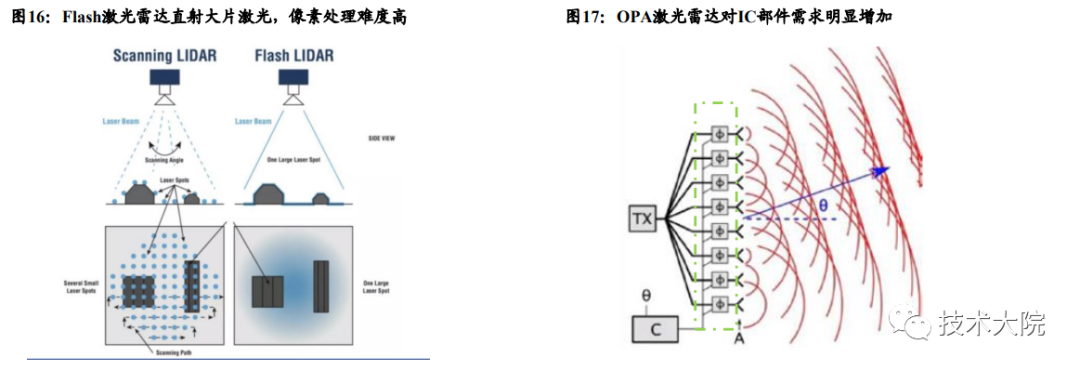
固态激光雷达扫描速度快、尺寸小,或将成为激光雷达最终方案:
Flash激光雷达:原理是快闪,因需处理海量像素,易 受干扰而损失一部分的探测精度
OPA激光雷达:部件固态化,尺寸小,但因当前技术限制,激光在最大功率方向以外 的地方会形成旁瓣,进而影响光束作用距离和角分辨率,分散激光的能量
单光子面阵激光雷达:采用焦平面扫描方式, 国际激光雷达厂商ibeo基于此方案打造的4D全固态激光雷达将在长城量产车型上搭载
激光雷达整体技术由运动式向固态演进,呈现体积小型化、部件固态化趋势:
固态化、芯片化逐渐成为主流趋势
能避免旋转带来的不稳定性,减少使用过程中的损耗
更易满足车规要 求,固态化、芯片化逐渐成为厂商研发主流趋势之一
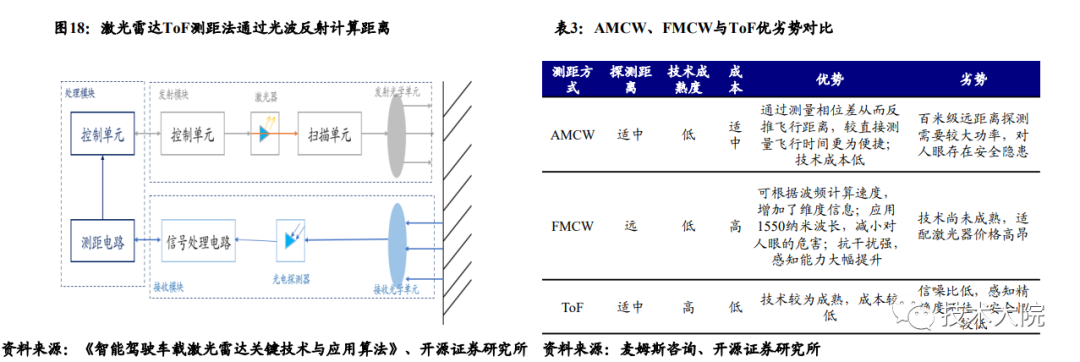
ToF测距方式为主流,具备4D高感知精度的FMCW逐渐受到关注
ToF测距式激光雷达:以激光作为信号源,由激光器发 射出的脉冲激光打到周围物体上引起散射,通过接收器接收光波反射时间进行测距,具有测量速度快,抗强光干扰能力突出的 优势,但存在信噪比低、安全性较低等问题
FMCW激光雷达:FMCW以调频波为基础,可以根据波的频率计算目标物 体的速度,相对于ToF天生增加了速度信息,达到4D感知的效果,当前仍处于探索阶段,未来有望逐渐得到普及
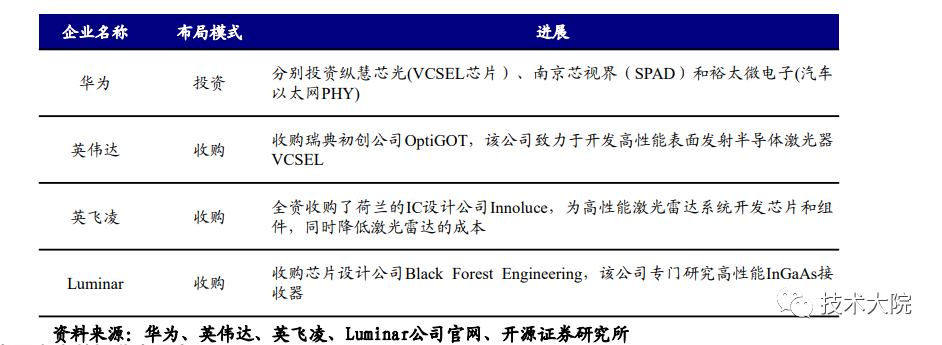
巨头入局,收购、投资助力多方厂商切入激光雷达芯片细分赛道:
华为分别投资了纵慧新光与南京新视界,意在深入VCSEL芯片与SPAD 的研发,加强自身在激光雷达收、发模块的集成能力
英伟达也通过收购瑞典初创公司OptiGOT,完成自身在VCSEL上的布局
激光雷达不是一个赢家通吃的市场。很多公司还在验证自己的想法。固态化、小型化、低成本化将是未来激光雷达的发展趋势,混合固态激光雷达成为了当前上车的主流产品。
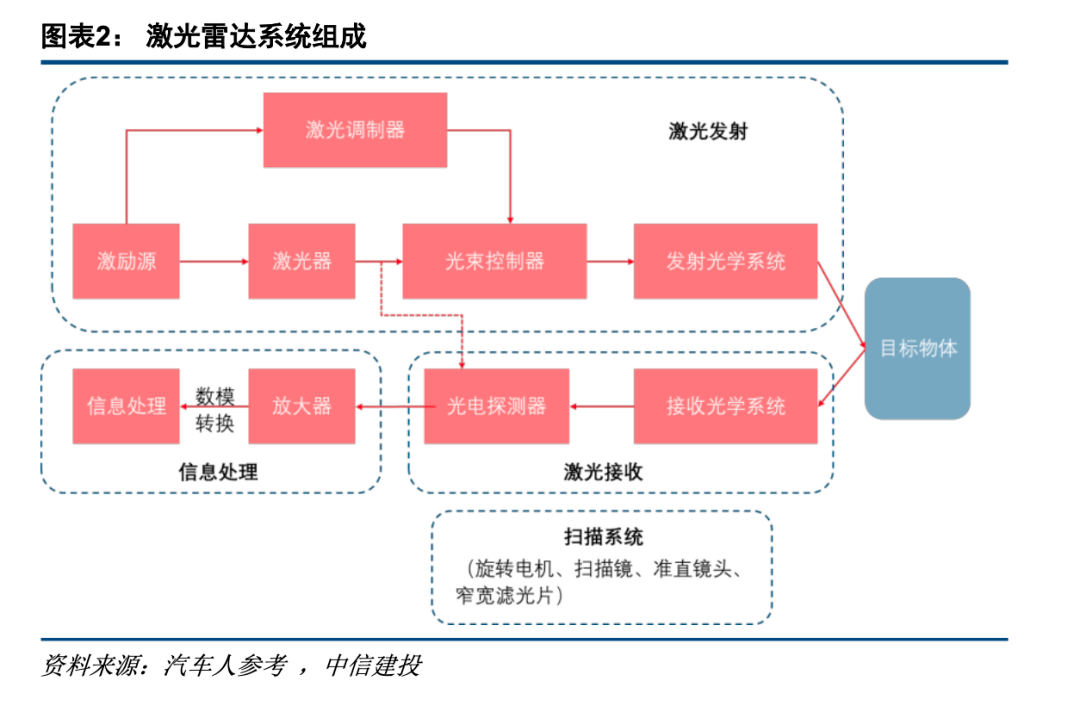
激光雷达接收、发射模块成本占比较高,激光雷达主要分为激光发射模块、扫描系统、接收模块及信息处理四个部分。目前激光雷达中的发射与接收模组仍占据了过半成本,人工调试费用也对激光雷达的成本具有较大影响。
主要有哪些方面可以降低成本?
一个是规模效应,对于车规级激光,如果规模起来,对整个成本会有大幅下降,这一部分的降本空间非常大。2020年的是L2的渗透率是12%,到2025年渗透率会达到60%
扫描这块相对比较成熟,但是还是有很多东西可以做的,所以这部分降本空间属于中等
对于光学镜头这一块,国产化这块赛道已经非常拥挤了,本身也已经成熟,所以这一部分的降本空间比较小
对于芯片化,收发模块激光器、探测器、驱动、模拟前端芯片占到整个激光雷达成本的60%,如果作为一个芯片化,降本空间会非常的大
另外激光雷达的工艺也很重要,工艺的降本空间也非常大
基于规模效应,产品本身和工艺调试,笔者认为到2030年激光雷达的价格有望大幅降低,根据瑞银的预测,激光雷达的单价从现在的7000RMB,到2025年会降到1200RMB,最终降到600RMB。
华为入局,光电优势推动激光雷达成本大幅下降:华为启用“爬北坡战略”,凭借自身光电优势,大幅提升激光雷达性能,前 融合感知技术进一步简化算法,降低误判。此外,华为还以激光雷达Tier1身份广泛投资光电半导体企业,赋能国内Tier2,推动 国产供应链崛起。

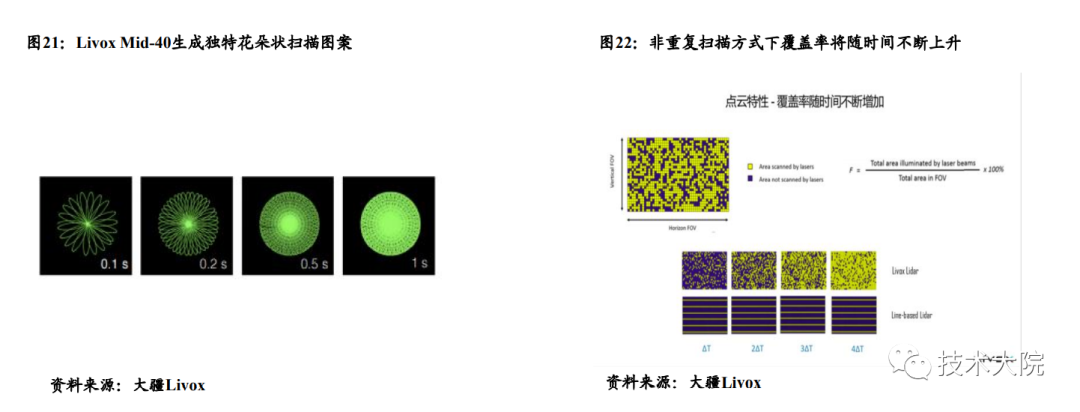
另辟蹊径,大疆棱镜方案有效降本:无人机龙头厂商大疆孵化览沃科技(Livox)入局激光雷达,采用棱镜式扫描方案,利用电 机带动一边薄一边厚的透明玻璃进行旋转,实现扫描,叠加其独创非重复扫描方式,大幅提升点云在高温、振动等恶劣环境下 的稳定性与可靠性。大疆在无人机领域积累的电机精准调控技术及自动化产线也为其激光雷达构筑护城河。
无论是全球还是中国市场都有一个比较大的增长,不止车用领域,其实激光雷达在其他应用领域也是非常大的蛋糕,总体来看可以分为四个大的方向:
无人驾驶(指L4和L5级别的无人驾驶)
高级别的辅助驾驶,就是平时关注的乘用车,主要指L2\L3\L4级别的自动驾驶,目前由于法规等各种各样的问题,目前只能部分场景实现自动驾驶
移动机器人,像配送、清扫、仓储、巡检等这一块也会用到激光雷达
数字孪生城市,主要是用于路端进行交通监控、实时的采集
在自动驾驶、自主行动机器人领域,激光雷达真正实现了一边感知世界、一边孪生世界的“高能”应用。
在自动驾驶车端,它充当“眼睛”,观察路况与周围环境,并精准判断物体与自身之间的空间距离,再通过AI算法,例如基于三维点云的目标识别、目标跟踪与语义分割,去分类和学习、理解周围的环境和动态物体,同时也提供目标物空间位置。相当于长了“一点脑子”,告诉自动驾驶汽车周围是什么(这是人,这是其他车,或什么类型的环境),并作出预测输出(可做什么决策)。

3D点云的目标识别
要让汽车逐步脱离人类自动驾驶(L3-L5级别),高精度地图也是少不了的,而构建高精度地图的主要“原料”,就是雷达激光点云数据。专业采集车会预载如激光雷达、摄像头、惯性测量单元(IMU)和定位设备等多种传感器,支持采集高达厘米级精度的空间数据,如高精度地图(HDmap),其基础成品质量很大程度也取决于配备的激光雷达产品的数据获取能力,一台专业高精度地图采集车常高达600-1000万级。
自主行动机器人与激光雷达又是怎么一回事呢?
这涉及到一个重要的深度学习概念——同步定位与建图(SLAM)。就拿波士顿动力狗来说,它能代替人类去切尔诺贝利监测核辐射量,下到最深的矿井采集数据,在崎岖高低的工程现场扫描建模工程进度,当它们在探索行进时,可以通过摄像头和专业空间感知手段,例如雷达激光,一边移动,一边构建一幅相应的数字空间地图,这种如同人类的在陌生环境中的记忆行为模式,就是SLAM,通过这种模式,机器人可自主行动并运用激光雷达扫描获取详细的空间数据。
 波士顿动力狗利用雷达激光扫描,在工程建筑建模方面的应用 | Boston Dynamic
波士顿动力狗利用雷达激光扫描,在工程建筑建模方面的应用 | Boston Dynamic
可以看到,在这个领域,激光雷达技术同时充当了自动驾驶车辆和机器人感知世界的“眼睛”,获取的点云数据又成为其认知世界的“记忆”,通过不断输入与输出的循环上升,形成了机器自动行动的决策依据与智能学习闭环。
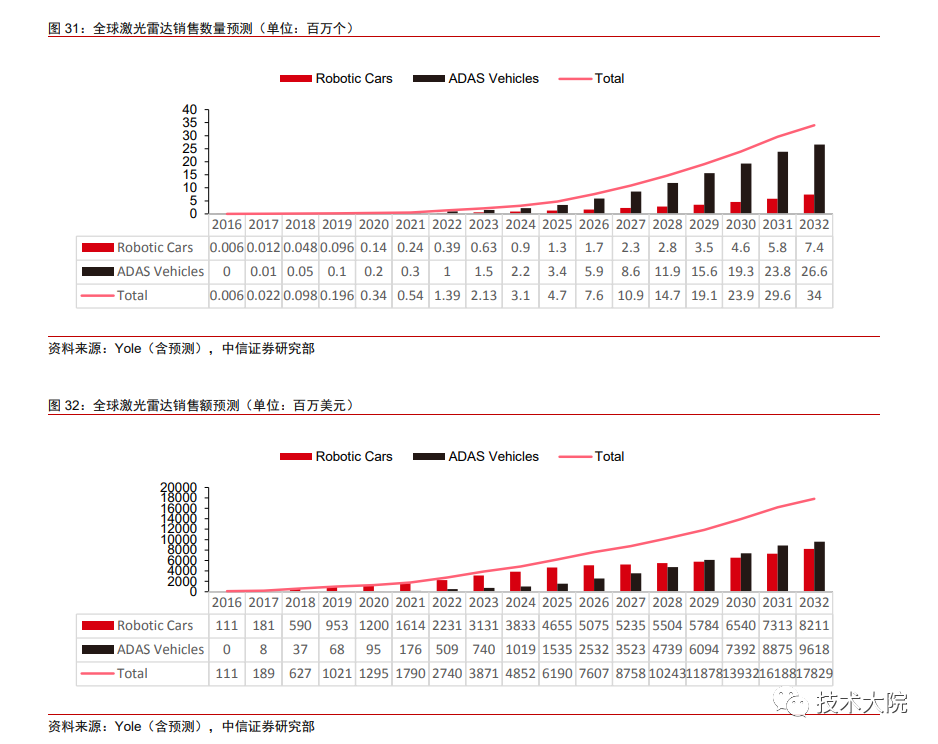
未来随着自动驾驶技术的进一步普及,激光雷达市场规模将会进一步扩大,而单车价 值量下降将会进一步有利于激光雷达的量产使用,预计 2030 年全球激光雷达市场规模将 超百亿。咨询机构 Yole 预计,激光雷达应用是目前汽车行业增长最快的行业之一,2025 年全球激光雷达出货量 约 470 万个,全球激光雷达销售额约 61.9 亿美元;2030 年全球激光雷达出货量约 2390 万个,销售额约 139.32 亿美元。
总的来说,自动驾驶激光雷达市场规模有望超千亿美元,预计行业整体将会向“低成 本化”、 “量产化”、“固态化”、“智能化”发展,同时国产势力近年来逐步崛起, 未来市场发展值得期待。
把2021年定为激光雷达的量产元年,更多可能是一种营销的噱头,可能没有办法发挥特别大的作用。
L2到L5,如果要用激光雷达作为主传感器的话,它要实现360度的感知,如果用现在固态或者半固态激光雷达(大部分是120度)一般需要3个左右,再高级别一点可能要到4个左右。总体上来讲,对于L3需要2~3个左右,对于L4/L5,需要3~5个左右。
激光雷达真正要进入量产车,智能化和软件感知算法将是更 大的挑战。对于自动驾驶环境感知,传感器硬件通常只完成了数据收集的工作,要真正获 取交通参与者方位、类别、速度、姿态等信息,必须经过感知算法的实时计算分析。
感知 算法的优劣直接决定对交通参与者的检出率、感知准确度和感知距离。如果感知算法性能 不足,即使雷达硬件线数再高,也无法获得优质的感知结果,所以说感知算法是激光雷达 感知系统的“第二个核心”。
感知系统的刚需揭示了一个被掩盖在激光雷达硬件光环下的 核心需求, 相比信息“收集器”,自动驾驶需要更聪明的信息“收集+理解者”。一个典型 的行业案例是速腾聚创在智能版的 MEMS 固态激光雷达 RS-LiDAR-M1 Smart 中嵌入 AI 感知算法与专用计算芯片组,可以同时输出三维点云数据与障碍物检测、识别、跟踪,路 面交通标示等路况信息,充分保证决策层在冗余的信息基础上完成正确的驾驶决策,帮助 车辆实现 Level3~Level5 高级自动驾驶与 ASIL-D 高级安全性。

速腾聚创第二代智能固态激光雷达
过去几年,人们对传统车企的关注可能比较少,而是将更多目光集中在了以特斯拉、蔚来、小鹏、理想等代表的新势力上。即使是关注,也是更多集中在转型压力上,反而忽视了传统车企背后所做的努力。
业内人士普遍认为,电动车看似是动力源的革命,其实是叠加在动力源上的新技术革命。传统车企转型最重要其实在自动驾驶这一领域,从最初的“油改电”,到后来的平台化造车,再到从无到有建立新品牌,传统车企一直备受人们质疑。
不过看似传统车企好像还在艰难地追赶电动化的风口,其实它们在智能化赛道上已经下了不少功夫。这不由让人怀疑,过去几年传统车企是在“明修栈道、暗度陈仓”?
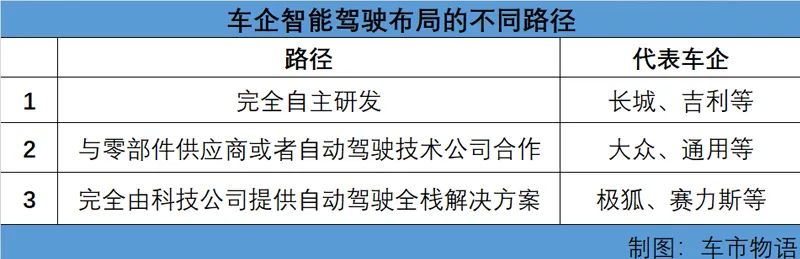
智能驾驶布局路径概览
就目前市场来看,不同车企所采取的策略有所不同,不过大致分为三条:有完全自主研发的,有和自动驾驶公司联合开发的,还有完全交由提供完整解决方案的供应厂商。
传统车企其实早就认识到智能驾驶的前景。凭借自身雄厚的资金支持、强大的研发能力以及上下游的资源整合能力,已经在智能驾驶领域打下了坚实的基础。接下来,他们要用硬件占领技术、流量高地,从而赢得一丝先机。
目前各主机厂在智能化量产进度层面落后于特斯拉,激光雷达能够从硬件层面帮助主机厂实现追赶,提速智能化进展。
自汽车产业向电动化、智能化转型以来,传统车企就一直备受质疑,唱衰的声音络绎不绝。但经过燃油车时代的“火拼”才走到今天的它们,会这么沉不住气吗?哪怕是“巨象转身”,也总有转过来的那一天。
随着激光雷达陆续上车,这些传统车企的优势正在慢慢凸显。传统车企看中的是智能驾驶这条主赛道,而激光雷达俨然已经成为传统车企快速完成转型,突破困局、实现超车的“拐点”。