绑定手机号
确认绑定









站起控制对于人形机器人至关重要。但现有方法要么局限于忽略硬件限制,要么依赖于预定义的站起轨迹,无法在真实场景中实现多姿势站起。
为此,上海交通大学联合上海AI Lab、香港大学等提出一种站起控制强化学习算法HoST(Humanoid Stand-up Control)。其中,上海交通大学与上海AI Lab联培博士生黄涛为论文一作。
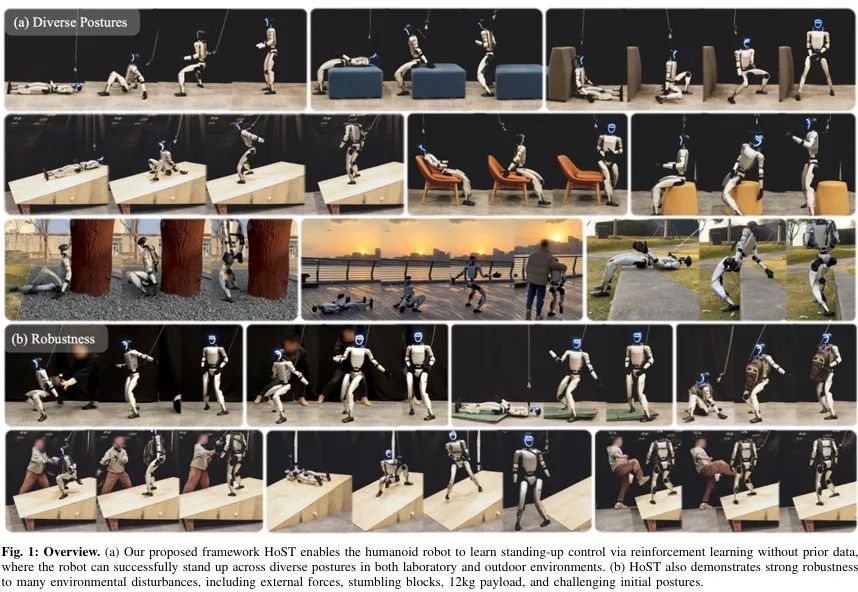
HoST能够让人形机器人从零开始学会在各种真实场景、地形中用不同姿势快速站起,兼具平滑性、稳定性、鲁棒性。不同于现有工作,HoST能够不依赖于预定义的站起轨迹,并且解决了真机部署下的动作不平缓与抖动等问题。
具体而言,HoST算法将多评判强化学习、平滑正则化和隐式速度约束相结合,让机器人学习自适应站立动作。该算法可以在多种虚拟地形上训练并将技能直接部署在真机上,通过内置速度限制实现流畅的运动控制,有效减少了机器人在站起过程中出现震荡情况和剧烈动作,保护硬件。
HoST算法具有强鲁棒性,控制策略能够抵御外部干扰,如力、有效载荷、柔软的绊倒物体和随机扭矩丢失。还能够帮助机器人在紧急状态下站起,具有跌倒恢复、动态平衡和站立稳定性等能力。
在经过仿真环境训练后,黄涛博士等研究人员还成功将HoST算法部署在了宇树G1人形机器人上。无论是在台阶、石子路、草坪等室外环境,还是在沙发、斜坡、软垫等多种室内环境,甚至是在背负6千克的大背包、被测试人员用物体干扰时,宇树G1机器人均都能实现快速站起。
如下视频Demo可以看到,在凹凸不平的石子路上,机器人能毫不犹豫的快速起身。
当被测试人员用黑色圆球干扰时,机器人在快速起身并向前踉跄两步后,仍能保持稳定站立。
3月10日晚7点,智猩猩邀请到论文一作、上海交通大学与上海AI Lab联培博士生黄涛参与「智猩猩AI新青年讲座具身智能专题」第22讲,以《人形机器人多姿势站起控制HoST及宇树G1部署》为主题带来直播讲解。
讲者
黄涛,上海交通大学与上海AI Lab的联培博士生
师从林达华教授和庞江淼博士。硕士和本科分别毕业于香港中文大学和上海科技大学。目前主要研究方向是人形机器人控制学习。于ICRA、IROS、ICLR、SIGGRAPH等会议上发表多篇论文。
第 22 讲
主 题
《人形机器人多姿势站起控制HoST及宇树G1部署》
提 纲
1、人形机器人站起控制的应用场景
2、基于学习的站起控制研究现状与挑战
3、站起控制强化学习算法HoST
4、多姿势站起与鲁棒性测试
5、结合宇树G1的sim2real分析
直 播 信 息
直播时间:3月10日19点
成果
论文标题
Learning Humanoid Standing-up Control across Diverse Postures
论文链接
https://arxiv.org/abs/2502.08378
项目地址
https://taohuang13.github.io/humanoid-standingup.github.io/
如何报名与入群
有讲座直播观看需求的朋友,可以扫码添加小助手莓莓,发送私信“具身智能22”进行报名,报名通过后将给到直播地址。
针对此次讲座,也有组建学习群。希望入群参与探讨的,也可以与莓莓进行申请。