绑定手机号
确认绑定









自动驾驶汽车领域有一个比较奇特的现象,无论是谷歌无人车Waymo,还是自动驾驶的初创公司都不约而同地选择了混合动力的汽车作为自动驾驶技术研发的原型车,而不是选择燃油车或者电动车。比如谷歌无人车的初代车型就选用了丰田普锐斯Hybrid和雷克萨斯RX540h,初创公司使用的较多林肯MKZ也是混合动力的。

为什么拥有混合动力的车型这么受到无人车公司的青睐呢?有三方面的原因。
首先是丰田、林肯等混动车型为无人车公司提供了线控驱动(Drive-by-wire)技术。这样一来无人车公司就不在方向盘和油门、刹车踏板上安装机械结构来控制车辆了,取而代之的是用电信号控制方向盘转角和油门、刹车踏板的开度。
其次是自动驾驶原型车的能耗问题。自动驾驶研发的初期,车上会安装各种功耗很大的工控机和各种调试设备,从燃油经济性和行驶里程角度来看,混动车型比燃油车和纯电动汽车更加适合。
最后是拥有混合动力的车型更加符合自动驾驶对控制的需求。以丰田的混动技术为例,在低速时使用锂电池驱动电动机工作,在中高速时汽油发动机作为主要动力输出。对自动驾驶来说,低速运动(比如泊车)的控制精度比中高速(比如巡航)的需求更高,混合动力在低速时使用电机驱动的特性,很好地弥补了燃油车在低速时输出的力矩不够线性的缺点。
混动技术的优势这么多,那么市面上有哪些搭载了混动技术的车型呢?
当前搭载了混动技术的车型大都出自两大品牌——丰田和本田。下面我就从技术剖析的角度,聊一聊两田在辅助驾驶领域的技术对比吧。
丰田的辅助驾驶系统Toyota Safety Sense智行安全系统和本田辅助驾驶系统的是Honda SENSING安全超感系统都具备L2级辅助驾驶(高速、环路辅助驾驶)的功能,这两款辅助驾驶系统的差异如何?
丰田Toyota Safety Sense VS 本田Honda SENSING
秉着工程师用数据说话的原则,我将丰田Toyota Safety Sense和本田Honda SENSING这两套L2级辅助驾驶系统进行了整理,这些数据包含了主要的传感器配置和性能参数。
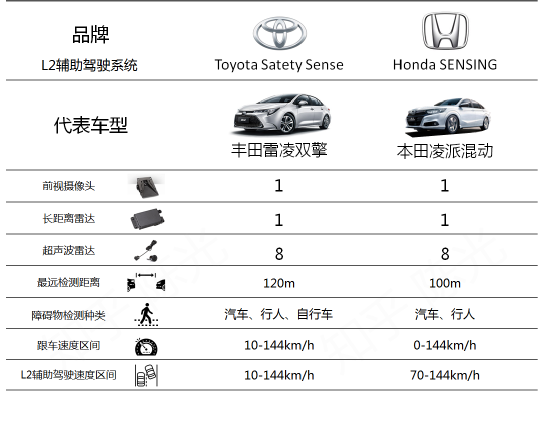
丰田和本田都配备了一个前视摄像头,用于识别自车前方的障碍物和车道线,以实现跟车和车道保持的功能,同时还配备了一个长距离的毫米波雷达用于精确测量前方障碍物的位置和速度,保障跟车的安全性和舒适性,还有前后各4个超声波雷达,用于辅助近距离(0~3米)近距离的障碍物检测。
感知能力比拼
两款混合动力的车型所搭载的传感器种类和数量上差异不大,但是他们的感知能力还是有所区别的。感知能力的高低是决定自动驾驶系统是否安全、可靠的一个重要因素。
决定感知能力高低的第一个指标是最远的障碍物检测距离。自动驾驶的第一要务是保证驾驶的安全性,因此,检出障碍物的距离越远,越能为自动驾驶系统争取出足够多的响应时间,做出正确决策。尤其是汽车高速行驶时,多半秒的响应时间就可能避免一场事故的发生。
最远的障碍物检出距离是评价辅助驾驶系统的重要指标之一
Toyota Safety Sense在检测距离上来说比Honda SENSING检出距离高出20%左右,所以在检出距离上Toyota Safety Sense的120米比Honda SENSING的100米表现更优秀。
决定感知能力高低的第二个指标是检测障碍物的种类。当前主流的L2级自动驾驶系统都能够很好地支持行人和汽车的检测,但国内路况的很容易给你来个意想不到,比如突然出现的自行车(骑行人),这类障碍物在交通中也是属于脆弱的一方,这也给L2自动系统提出了更高的要求。因此能够实现更多种类障碍物的检测,也越意味着能够在开启自动驾驶系统时多一分保障。

在检出的障碍物种类中,Toyota Safety Sense可以实现全天候的汽车、行人和白天的自行车(骑行人)检出,Honda SENSING仅能检出汽车和行人。在检出障碍物的类别上,Toyota Safety Sense更胜一筹。
对比障碍物检出距离和障碍物检出类别这两个重要指标后,丰田的Toyota Safety Sense在感知能力方面明显优于本田的Honda SENSING。
L2级辅助驾驶能力比拼
相信很多用过车道保持系统的驾驶员一定遇到过这种情况,就是在一些曲率稍微大点的弯道,汽车跑着跑着就跑偏了,车道保持系统无法再保持。造成车道保持退出的大概率原因是系统的控制算法还不成熟,路况稍变复杂就提示驾驶员接管。
因从事自动驾驶研发工作的原因,我调研和试驾过市面上很多搭载了L2级别辅助驾驶功能的汽车,其中就包括Toyota Safety Sense和Honda SENSING。
我一般会选择上海的内环高架来检验和评判L2级辅助驾驶功能的好坏,尤其是南浦大桥附近的大曲率回环路段。如果能够在这种极端复杂的路段保持车道保持和巡航功能正常运行,那就证明这套系统的可靠性足够高。

极具挑战性的南浦大桥大曲率路段
使用丰田开启Toyota Safety Sense的L2级辅助驾驶系统后,在不堵车(车速维持在10km/h以上)的情况下,辅助驾驶系统正常运作,能够在无接管的情况下完成巡航+车道保持功能,顺利通过大曲率弯道;在堵车情况下,前车离开后,需要驾驶员人为地踩一脚油门才能再次进入辅助驾驶状态。
使用本田开启Honda SENSING的L2级辅助驾驶系统后,在高速巡航时(车速维持在70km/h以上)的情况下,辅助驾驶功能的表现能力和Toyota Safety Sense的表现一样优秀。但一旦速度低于70km/h时,车道保持辅助系统就退出了,仅保留巡航功能。因此Honda SENSING未能通过南浦大桥路段的考验。
总的来说,从巡航+车道保持的能力上来看,Toyota Safety Sense的实际体验是优于Honda SENSING。唯一能够弥补Honda SENSING遗憾的是,本田加入了低速前车跟随系统(LSF,Low Speed Follow),可以在前车停止起步后,不用驾驶员踩油门直接完成启动。
传感器安装位置比拼
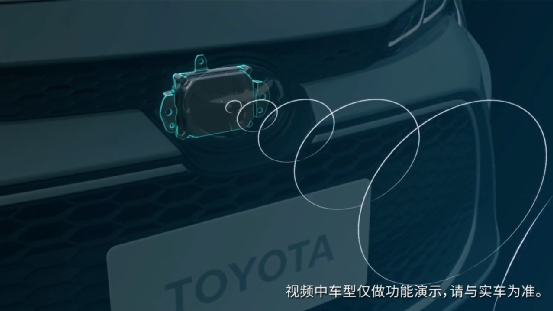
Toyota Safety Sense和Honda SENSING的前视摄像头都是安装在挡风玻璃下方的,不同的是毫米波雷达的安装位置,如下所示。

毫米波雷达发射的电磁波能够穿透毫米级别的物体,但很难穿透汽车、人等目标,因此根据波束发出到返回的时间差,即可计算雷达和目标间的距离。
基于电磁波无法穿透所有物体的特性,很多车型与本田类似,采用了“外置”雷达的方式。即在进气格栅附近挖个槽,将雷达安装在槽内,避免雷达因遮挡导致的误检。这种安装方式的坏处是牺牲了外观,前脸会因为凹槽显得突兀。
丰田为了避免在前脸上挖槽,选择了成本更高的“内置”雷达方式。即将雷达“隐藏”在丰田的车标后方。为了不影响雷达的检测性能,每个车标都需要采用了特殊的镀铟工艺,且车标的厚度要精确地控制在毫米波半波长的整数倍。相比于“外置”的方式,“内置”雷达的成本会高出上百元。但为了漂亮,这些钱花得值。
结语
从上面三个维度的评估可以看出,丰田和本田在高速情况下辅助驾驶的表现差别并不大,低速的表现各有千秋。但总体来看,丰田Toyota Safety Sense还是优于本田Honda SENSING的。
丰田和本田作为传统整车厂在辅助驾驶能力的推广宣传上,相比于造车新势力保守太多。这使得很多购买了丰田、本田车型的驾驶员并不清楚它们的车所具备的辅助驾驶能力,而驾驶员为这个功能买单的花销并不小,所以拥有这两套辅助驾驶系统的驾驶员,强烈建议你们多多使用。