绑定手机号
确认绑定









作者:Chayenne Zhao
地址:
https://zhuanlan.zhihu.com/p/1992587332189197731
经授权发布,如需转载请联系原作者
想要系统性学习 SGLang Scheduler 的想法已经有一年了。大概在 24 年 11 月,当时我和几个朋友一起写了 SGLang Code Walkthrough,但是当时止步于 KV Cache Management 和 Scheduler 分析,并未更进一步。从那时起,已经有了一整年,SGLang 项目也发生了翻天覆地的变化。但是,在我看来,Scheduling 算法本身早已收敛,最大的创新还是 24 年 12 月时,怜悯主力完成的 zero-overhead batch scheduler。此后,SGLang 很长时间的优化都是在 MOE 架构上。我自己也一直在忙着和诸多 RL framework 打交道,学习 SGLang KV Cache 和 Scheduler 的想法就一直搁置。但是,这个事情必然是悬在我心上的,否则经常看到在 SGLang 的各种技术讨论群里,大家聊的内容有许多我都毫不了解,让人产生了深深的技术焦虑。
更进一步,Junrong(Qwen RL Infra team 成员,也是 SGLang RL 老队友)有次给我说过,“现在感觉,很多时候 RL infra 的上限,其实取决于对 SGLang 和 Megatron 本身的理解程度”。他这话时常点醒我,对推理和训练系统本身的深刻认知,是推动 RL infra 发展的关键。事实也是如此,之前本人写了非常多 RL 系统深思,比如:
1. 深入浅出 DeepSeek MoE,EP 与 FSDP 经典二次开发
2. RL 系统深思:深入理解权重更新机制
3. RL 系统深思:FSDP 训练后端
这篇文章会 follow 以上三篇文章的思路,深入理解 SGLang 的调度系统,从 KV Cache 到 Overlapped Scheduling,一文读懂 SGLang 的调度巧思。
【感谢刘芷溢的 SGLang Scheduler 技术变迁原文】
考虑到 Scheduling 系统几乎是 SGLang 最复杂的中心组件,为了便于理解,这篇文章的写作思路有过多次改动。总体上我会先单独抽出几个重要的 class 和数据结构,接着再从整体上分析调度器的工作流程。
01 Key Class and Data Structure
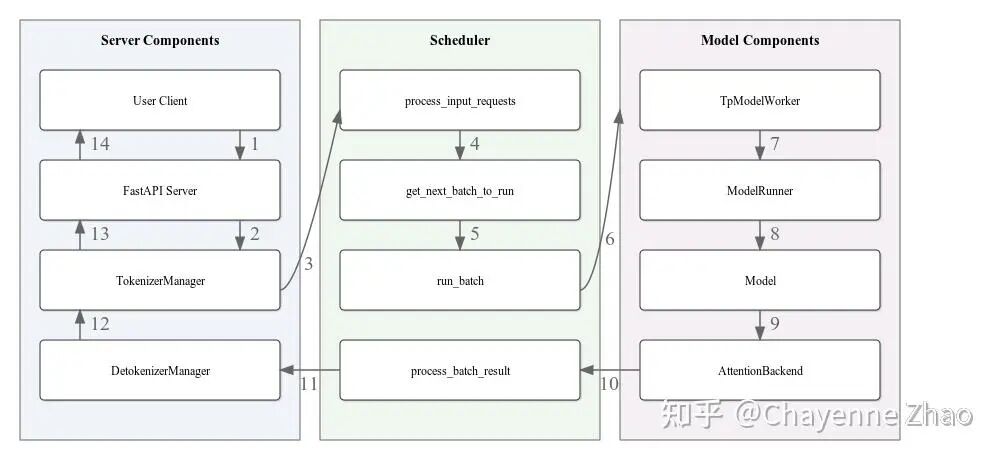
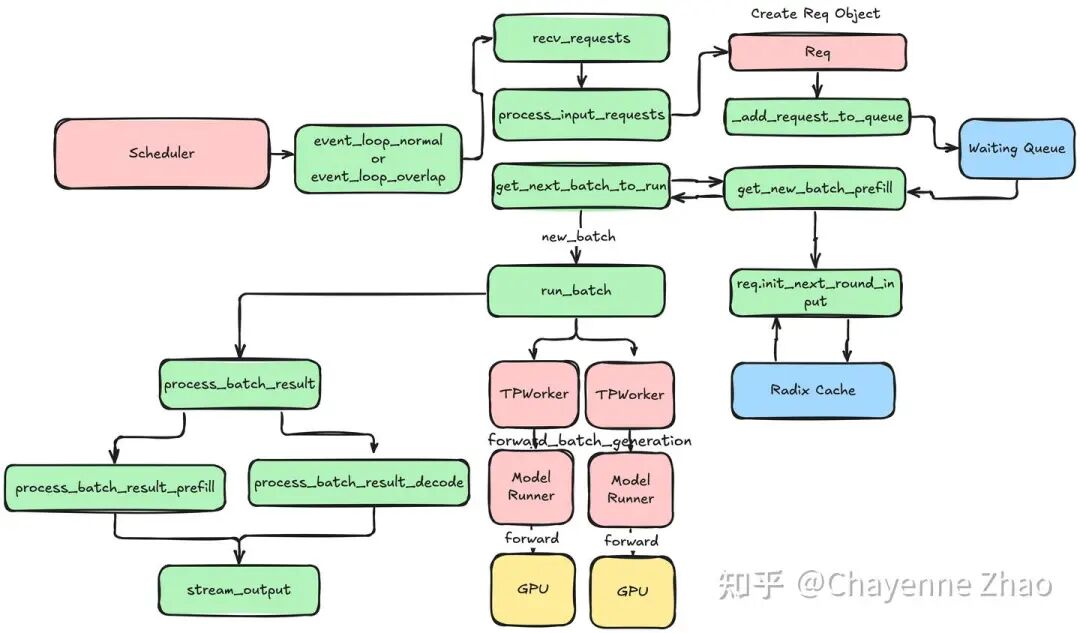
首先,回顾下 SGLang 的两个粗浅的架构图:
02 Scheduler
Scheduler 通过如下的核心逻辑对象来管理所有的 active request:
1. waiting_queue:顾名思义,waiting_queue 是一个优先队列,用于存放所有的 active request。所有还没有完成 prefill 的 request 和在 decode 阶段被 retract 回来的 request 都会被放入队列中;每轮循环之前,如果队列不为空,Scheduler 会调用 self.policy.calc_priority(self.waiting_queue) 函数,根据预设的策略(如 first come first serve、最长前缀匹配等)对队列进行重新排序,然后通过 PrefillAdder 组成 new_batch。
只有当最后一个 chunk 处理完后,这个请求才会被认为“完成了 Prefill”,从而进入 Decode 阶段。在中间状态下,它既不在 waiting_queue(因为它已经开始跑了),也不在传统的 running_batch(因为它还没到 Decode),它是通过 self.chunked_req 这个单独的变量被 Scheduler 挂载的。
2. new_batch:即将进入 prefill/extend 阶段的 requests。考虑到 chunked prefill 的特性,如果一个请求非常长,超过了 chunked_prefill_size,它会被标记为 self.chunked_req = True,接着被特殊处理:只有当这个请求的所有 chunks 都 prefill 完成后,它才会真正被标记完成了 prefill,从而被合并到 running_batch 中参与 Decode。对于中间状态,它既不在 waiting_queue(因为它已经开始跑了),也不在传统的 running_batch(因为它还没到 Decode),它是通过 self.chunked_req 这个单独的变量被 Scheduler 挂载的。新请求完整的调度轨迹:waiting_queue -> new_batch (当前轮) -> last_batch (下一轮开始时) -> running_batch (被合并);而已经在 decode 阶段的请求,其调度轨迹为:running_batch -> cur_batch (当前轮) -> running_batch (下一轮开始时)。
3. running_batch:即将进入 decode 阶段的 requests。当 GPU 显存(KV Cache Pool)碎片化严重或空间不足以支撑所有请求产生下一个 token 时,Scheduler 会通过 retract_decode 从 running_batch 中撤回某些 requests,将其返回到 waiting_queue。(PS:坦诚说 running_batch 和 new_batch 这两个命名至少在我看来,是有些误导性的。可能更准确的说法是 prefill_batch 和 decode_batch)。
4. cur_batch:在 Scheduler 主循环 run_batch 函数中当前正在被处理的 requests。注意到 SGLang 是 prefill first 的,当不存在新的 prefill batch 时,才进入 decode 阶段。因此,当 new_batch 存在时,cur_batch = new_batch,否则 cur_batch = running_batch。
def get_next_batch_to_run(self):
# 核心细节:只有上一轮是 Prefill (Extend),才需要合并到 Decode 队列
if self.last_batch and self.last_batch.forward_mode.is_extend():
self.running_batch.merge_batch(self.last_batch)
# Prefill 优先策略
new_batch=self.get_new_batch_prefill()
if new_batch:
return new_batch
else:
# 无 Prefill 时,更新并运行 Decode
return self.update_running_batch(self.running_batch)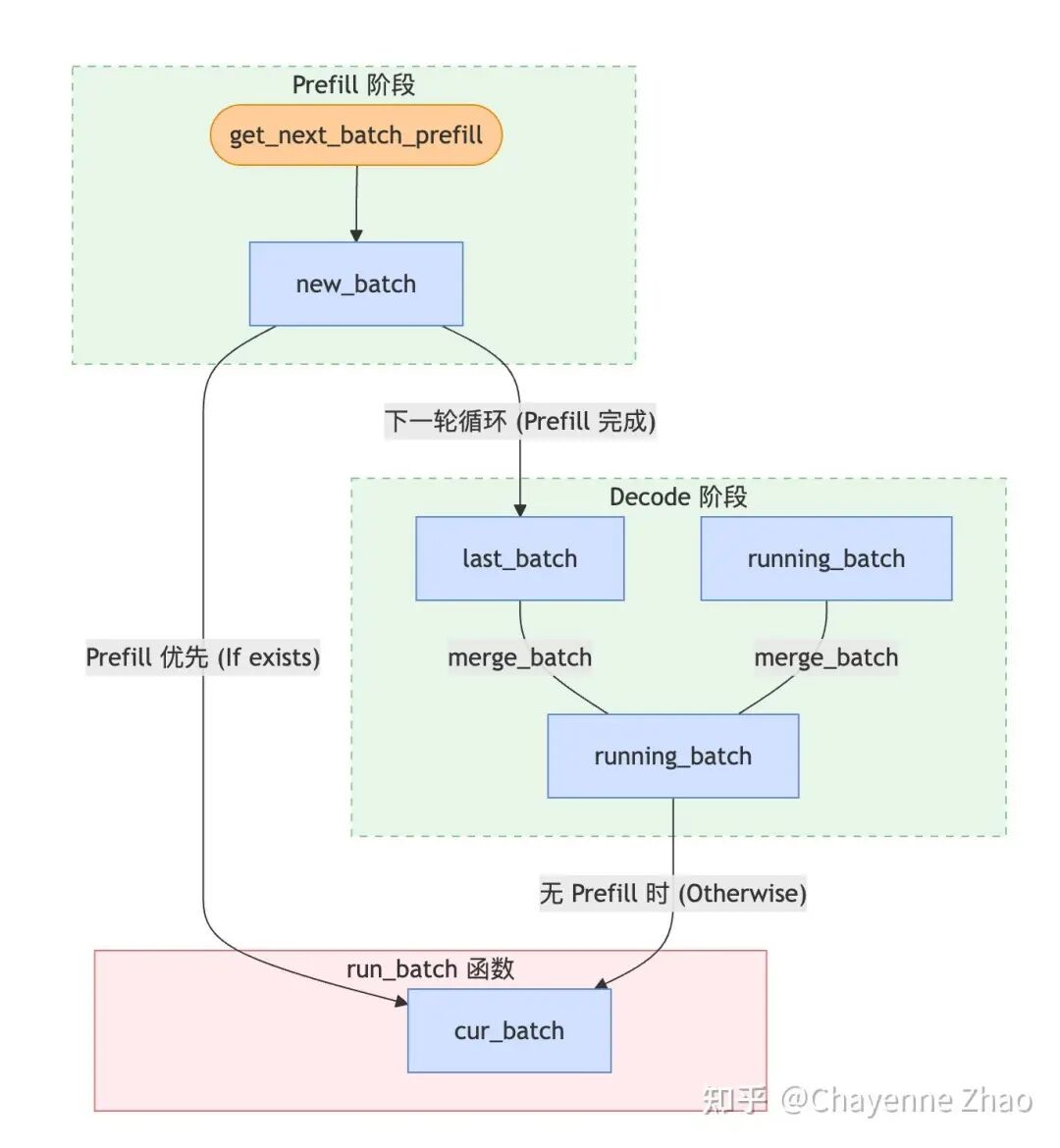
03 Batch
waiting_queue, new_batch, running_batch, cur_batch 描述一个请求的控制逻辑。这里我们分析 Scheduler 中定义的四个和 Batch 相关的 class:ScheduleBatch、ModelWorkerBatch、ForwardBatch 以及 GenerationBatchResult,他们描述了在不同的硬件资源,实际被执行的数据结构。注意到,waiting_queue, new_batch, running_batch, cur_batch 本质上都是 ScheduleBatch 的实例。
1. ScheduleBatch
ScheduleBatch 由 Scheduler 管理,包含高级调度信息,大部分数据位于 CPU 上。
class ScheduleBatch:
reqs: List[Req] # 请求列表
req_to_token_pool: ReqToTokenPool # 所有 requests 的所有 token 到 kv cache 的映射池
token_to_kv_pool_allocator: BaseTokenToKVPoolAllocator # KV cache 分配器
tree_cache: BasePrefixCache # 前缀缓存树
forward_mode: ForwardMode # 前向模式
# 批处理相关
input_ids: torch.Tensor # 输入 token IDs
seq_lens: torch.Tensor # 所有 requests 的序列长度
extend_lens: List[int] # 扩展长度 (seq_len - prefix_len)
prefix_lens: List[int] # 所有 requests 的前缀长度2. ModelWorkerBatch
ModelWorkerBatch 由 TpModelWorker 管理,只包含与 GPU 上模型 forward 相关的数据,它将从 CPU Scheduler 转换到 GPU ModelRunner。
class ModelWorkerBatch:
forward_mode: ForwardMode
input_ids: torch.Tensor # 输入 token IDs
req_pool_indices: torch.Tensor # 所有 requests 对应的 out_cache_loc 的索引
seq_lens: torch.Tensor # 所有 requests 的序列长度
out_cache_loc: torch.Tensor # 这个 batch 的所有 requests 新增的 KV cache slots 索引3. ForwardBatch
ForwardBatch 由 ModelRunner 管理,只包含与 GPU 上模型 forward 相关的数据,包含最底层的 tensor 数据。
class ForwardBatch:
forward_mode: ForwardMode
batch_size: int
input_ids: torch.Tensor
seq_lens: torch.Tensor
positions: torch.Tensor # 位置编码4. GenerationBatchResult
GenerationBatchResult 顾名思义,是模型 forward 的输出结果。
class GenerationBatchResult:
logits_output: torch.Tensor # 模型 forward 完整的 logits 输出和相关信息
next_token_ids: torch.Tensor # 经过采样的下一个 token 的 ID
num_accepted_tokens: int # speculative decoding 中被接受的 token 数量
next_draft_input: Optional[EagleDraftInput] # speculative decoding 的下一轮输入信息
extend_input_len_per_req: List[int] # 每个请求的扩展输入长度
extend_logprob_start_len_per_req: List[int] # 每个请求开始计算 logprob 的位置
copy_done: torch.cuda.Event # GPU 到 CPU 数据传输完成的同步事件
delay_sample_func: Optional[callable] # 延迟采样函数
future_indices: Optional[FutureIndices] # Future 机制中的索引信息在 TpModelWorker::forward_batch_generation 中,当 GPU 完成推理(Forward)并进行采样(Sample)后,它会将所有的输出打包为 GenerationBatchResult,并返回给 Scheduler。
# TpModelWorker.py 示意代码
def forward_batch_generation(self, model_worker_batch):
# 1. 运行模型前向
logits_output = self.model_runner.forward(forward_batch)
# 2. 采样得到 token
next_token_ids = self.model_runner.sample(logits_output, forward_batch)
# 3. 将所有结果打包返回
return GenerationBatchResult(
logits_output=logits_output,
next_token_ids=next_token_ids,
...
)Scheduler 在主循环中拿到 GenerationBatchResult 后,会根据它携带的信息来更新每个 Request 的状态。这主要发生在 process_batch_result 函数中:
更新 Token: 将 next_token_ids 中的值追加到各个请求的 output_ids 中。
判断结束: 检查新生成的 token 是否是停止符(EOS),如果是,则将该请求从 running_batch 移除。
流式输出: 根据 logits_output 里的 logprob 信息,如果是流式输出请求,则调用 stream_output 将结果推送到前端。
释放资源: 如果请求完成,通知 Radix Cache 释放或缓存对应的 KV Cache。
注意到,后文会提及到 Zero Overhead Scheduling 时,也即将 CPU 调度与 GPU 计算进行重叠。在这种调度模式下,GenerationBatchResult 是实现异步非阻塞调度的关键:
延迟采样 (delay_sample_func): 在重叠模式下,GPU 前向计算完成后,并不会立即阻塞等待采样结果,而是先返回一个包含采样函数(sample function)的 result。Scheduler 可以利用 GPU 采样的空档去处理上一个 batch 的后处理。
同步令牌 (copy_done): 它携带了一个 CUDA Event。Scheduler 在真正需要访问 CPU 侧的 token ID 时(比如要把 token 发给用户),会调用 result.copy_done.synchronize()。这确保了 CPU 不会读到还没传输完成的脏数据。
占位符管理 (future_indices): 在重叠模式中,当前的输出是下一个 batch 的输入。GenerationBatchResult 记录了这些 token 在 GPU FutureMap 中的位置索引,让下一个 batch 的计算能直接从 GPU 显存中读取结果,而不需要经过 CPU 再传递一遍。
04 KV Cache Management
Scheduling 本身涉及到 KV Cache 管理的部分不多,所以能够单独拎出来分析分析。非常有意思的是,在 SGLang 刚出的时候,由于 RadixCache 和 PagedAttention 的结合,SGLang 比起只用 PagedAttention 的 vLLM 而言,在 throughput 上有非常夸张的优势。彼时大概是 2024 年 8 月左右,也是我刚刚开始加入 SGLang 社区的时候。不过,那时候我心里有个固执的想法,我总是拿着 RadixCache 和 PagedAttention 做对标,认为这是同一个生态位的两种技术。甚至我当时还问过颖老板(Ying Sheng),结果她一直给我说这两个东西不矛盾。非常惭愧,从那之后,我也没有理解到二者的关系。虽然不理解也不妨碍我做 RL sys,到底还是心头一直好奇。这几天重新开始梳理 Scheduler,才想明白为什么 RadixCache 和 PagedAttention 是不矛盾的。到了 25 年初,RadixCache 和 PageAttention 这两项技术在 SGLang 和 vLLM 都是默认开启的,实现了类似操作系统中的“多级索引”。
【勘误:貌似 vLLM 的前缀缓存就叫做 Prefix Cache,和 RadixCache 有一定区别】
实际上,Paged Attention 类似操作系统中的页表,解决了“逻辑缓存地址到物理存储地址”的映射问题;让逻辑上连续的 KV Cache 可以分布到物理上散乱的实际 VRAM 里,减少显存碎片;而 Radix Cache 则负责的是“缓存复用”的问题,前缀相同的 requests 能够复用一致的逻辑缓存地址,避免重复计算。
维度 | Paged Attention (寻址层) | Radix Cache (策略层) |
|---|---|---|
解决的问题 | 显存碎片。解决逻辑连续但物理离散的问题。 | 重复计算。解决多个请求之间 KV 数据的共享。 |
OS 类比 | 页表 (Page Table):将虚拟地址映射到物理页。 | 共享库/文件缓存:多个进程共用同一物理内存块。 |
关注点 | 关注“怎么存”:如何利用不连续的显存块。 | 关注“存什么”:哪些前缀是一样的,可以复用。 |
关系 | 没有分页,共享会因内存碎片而难以实施。 | 利用分页提供的灵活性,实现极致的复用。 |
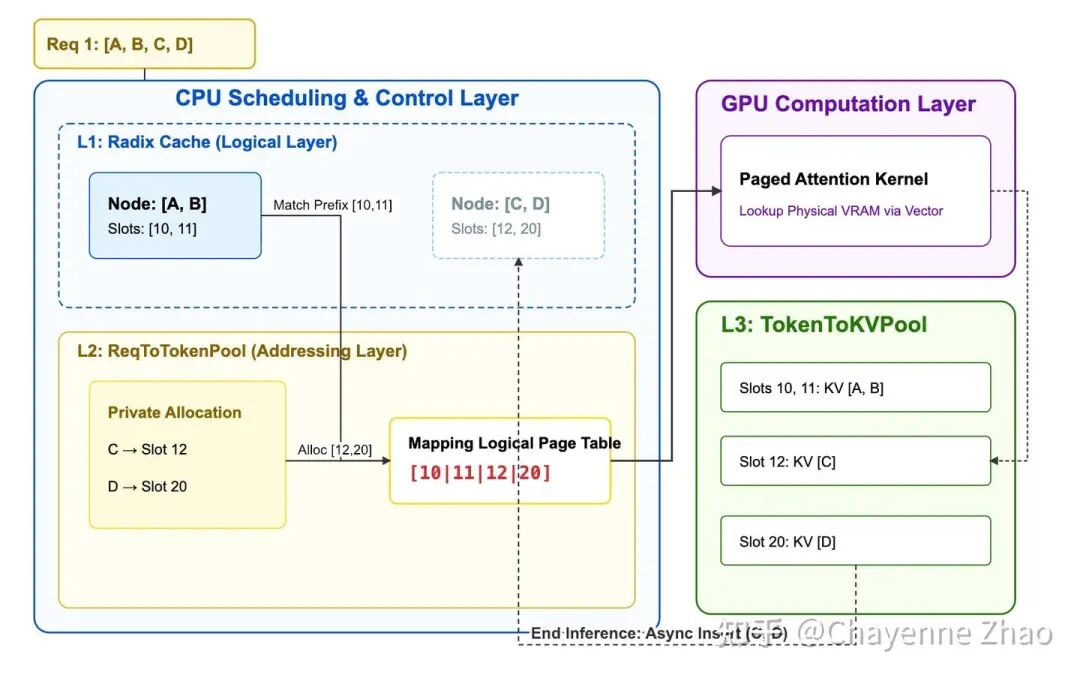
有了这些认知,我们举一个三个 requests 的例子,来看看关键的数据结构 RadixCache、req_to_token_pool 和 token_to_kv_pool。假设系统正在处理以下三个共享部分前缀的请求:
# 假设系统在 Request 1 进入前,就已经处理了 "A, "B" 这个序列,对应的物理 Slot Indices 为 [10, 11]。
- Request 1: ["A", "B", "C", "D"]
- Request 2: ["A", "B", "C", "F"]
- Request 3: ["A", "B", "G", "H"]请求会经过如下三层缓存以完成调度与计算:
1. L1 Cache: RadixCache 逻辑层
RadixCache 是整个调度的入口,它负责维护逻辑 Token 序列与物理地址之间的长效映射关系。当一个新 Request 进入 Scheduler 时,首先会进入到 RadixCache 来查找是否存在已有的前缀。如果命中,RadixCache 会返回这部分前缀对应的物理 Slot Indices。比如 Request 1 进入时,由于 “A,B” 在 RadixCache 中已经存在,因此会返回 [10, 11]。同时,RadixCache 会给这些 Slot 加锁(lock_ref += 1),防止这些 Slot 被回收。RadixCache 是一棵 Radix Tree,每个节点(TreeNode)记录了一段 Token 序列及其对应的物理 Slot Indices。每个 TreeNode 存在引用计数 (lock_ref);只要有请求正在使用某一段前缀,该节点就被“锁定”,防止在物理层被回收。当显存不足时,RadixCache 负责决定释放哪些不再被引用的“冷前缀”。
class TreeNode:
def __init__(self, token_ids, slot_indices):
# 逻辑标识:从根节点到当前节点的路径所代表的 Token 序列
self.key = token_ids # 例如: ["A", "B", "C"]
# 物理索引:从根节点到当前节点的路径所代表的 Token 序列在 token_to_kv_pool 中的物理 Slot Indices
self.value = slot_indices # 例如: [10, 11, 12]
# 引用计数:当前有多少个正在运行的请求在使用这个节点
self.lock_ref = 0 # lock_ref > 0 时,该节点及其物理槽位不可被驱逐
# 树结构:子节点分支
self.children = {}
# 驱逐策略元数据:LRU 时间戳
self.last_access_time = time.time()
class RadixCache:
def match_prefix(self, token_ids):
# 1. 在树中搜索最长前缀
# 2. 命中后,增加该路径上所有节点的 lock_ref (锁定)
# 3. 返回物理 Slot Indices,供 ReqToTokenPool 拼凑“页表”
return matched_slot_indices
def evict(self, num_slots_to_free):
# 1. 扫描树中所有 lock_ref == 0 的叶子节点
# 2. 按照 last_access_time 从旧到新排序 (LRU)
# 3. 释放物理槽位并删除节点,直到凑齐足够的显存空间
pass2. L2 Cache: ReqToTokenPool 寻址层
ReqToTokenPool 是一个二维矩阵,行索引是请求 ID,列索引是 token 的位置,存储的是每个 token 的 KV Cache 的实际物理地址(location)。
Request 经过 RadixCache 后,会得到对应的物理 Slot Indices。接着,Scheduler 就会将这些物理 Slot Indices 写入到 req_to_token_pool 中该请求对应的行里。此外,对于私有部分,也即 Request 中 RadixCache 中没有命中的那部分 tokens,Scheduler 会申请新的物理 Slot,写入到 req_to_token_pool 中该该行的后续位置。还是以 Request 1 为例,在 radix cache 中,request 1 为 "A, B" 查询到的物理 Slot Indices 为 [10, 11],而为私有的 "C, D" 申请到的物理 Slot Indices 为 [12, 20]。因此,req_to_token_pool 中 Request 1 对应的行就是 [10, 11, 12. 20]。
请求标识 (req_pool_idx) | Pos 0 | Pos 1 | Pos 2 | Pos 3 | 说明 (Radix Cache 决策结果) |
|---|---|---|---|---|---|
Request 1 (R1) | 10 | 11 | 12 | 20 | 共享 ABC,私有 D |
Request 2 (R2) | 10 | 11 | 12 | 25 | 共享 ABC,私有 F |
Request 3 (R3) | 10 | 11 | 40 | 41 | 共享 AB,私有 GH |
实际上 req_to_token_pool 中的大小是 [request_num, max_context_len]:
class ReqToTokenPool:
def __init__(self, size: int, max_context_len: int, device: str, enable_memory_saver: bool):
# 主要存储结构:[请求数量, 最大上下文长度]
self.req_to_token = torch.zeros(
(size, max_context_len),
dtype=torch.int32,
device=device
)
self.free_slots = list(range(size)) # 可用槽位列表
self.size = size
self.max_context_len = max_context_len注意,当 GPU 完成了私有部分的 KV Cache 计算后,Scheduler 会调用 radix_cache.insert(),将这些 Request 私有的 Slot(如 R1 的 [12, 20])及其对应的 Token(如 [C, D])回填到树中。这样,原本属于 R1 私有的节点就变成了可共享的资源,使得后续的 Request 2 能够直接命中 "A, B, C" 前缀。
3. L3 Cache: TokenToKVPool 物理层
最后,我们来看三级物理索引 token_to_kv_pool,这是 GPU 显存中真正存放 KV Tensor 的地方。
经过了 L1 与 L2 cache 的逻辑与物理映射后,新 Request 的 KV Cache 完成了查找与分配。Scheduler 将这些 Requests 组成 batch,进入真正的 Forward 阶段。模型 forward 的过程中,GPU 算子会去 req_to_token_pool 里读取当前 batch 内每个 request 对应的物理 Slot Indices,接着在 token_to_kv_pool 中拿到对应的 KV Tensor。注意到,由于 Paged Attention 的存在,物理槽位完全不需要连续。以 Request 1 为例,在模型 Forward 时,GPU 算子只需要通过 req_to_token_pool 拿到物理索引序列 [10, 11, 12, 20],接着在 token_to_kv_pool 中拿到对应的 KV Tensor。即使这些数字在物理上跨度极大(中间有大量空格或其他请求的数据),映射表也能把它们在逻辑上“缝合”成一个连续的 Tensor。
物理槽位 (Slot Index) | … | 10 | 11 | 12 | … | 20 | … | 25 | … | 40 | 41 | … |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
KV 数据内容 | 其他 token | [A] | [B] | [C] | 其他 token | [D] | 其他 token | [F] | 其他 token | [G] | [H] | 其他 token |
共享状态 (策略层) | 未知 | R1 R2 R3 共享 | R1 R2 R3 共享 | R1 R2 共享 | 未知 | R1 私有 | 未知 | R2 私有 | 未知 | R3 私有 | R3 私有 | 未知 |
05 Normal Scheduler
介绍了上述关键的数据结构和逻辑之后,我们来看一下 Normal Scheduler 的流程。单个 Request 的 Scheduler 流程可以分为以下几个阶段:
Req → { Pre Schedule(CPU) → Compute Batch → Sample(GPU) → Post Schedule(CPU) } → { Pre Schedule(CPU) → ...或者这样的伪代码:
def event_loop_normal(self):
"""A normal scheduler loop."""
while True:
# 1. 接收请求并处理入队
recv_reqs = self.recv_requests()
self.process_input_requests(recv_reqs)
# 2. 获取本轮执行批次 (Prefill 优先)
batch = self.get_next_batch_to_run()
self.cur_batch = batch
if batch:
# 3. 运行推理与采样
result = self.run_batch(batch)
# 4. 执行后处理(更新状态、流式输出、释放缓存)
self.process_batch_result(batch, result)
else:
# 空闲时执行自检与重置
self.self_check_during_idle()
self.last_batch = batch06 Pre Schedule
1. 进入等待队列 (Req → Waiting_queue)
一共是两关键函数,Schedule :: recv_requests 和 Schedule :: process_input_requests。前者负责通过 zmq 从 tokenizer 获取 requests。后者负责对收到的请求进行解包,分发并构造为新的 Req 对象,并插入到 waiting_queue 中,将收到信号返回给 tokenizer。
def recv_requests(self):
"""Receive requests from tokenizer manager."""
return self.tokenizer_manager.recv_requests()
def process_input_requests(self, recv_reqs):
"""Process input requests."""
for recv_req in recv_reqs:
worker_id = recv_req.worker_id
recv_req = recv_req.obj
output = self._request_dispatcher(recv_req)
self._add_request_to_queue(output)
self.tokenizer_manager.send_response(worker_id, output)2. Pre Schedule Prefill (waiting_queue → new_batch)
新的请求到达 waiting_queue 后,首先进入 Prefill 阶段。
PrefillAdder::get_new_batch_prefill:选择合适的请求,构建 Prefill Batch。
Req::init_next_round_input():根据当前请求的 input_ids在 RadixCache 中匹配,得到前缀长度。
ScheduleBatch::prepare_for_extend():分配 req_pool_indices,为 Request 在 req_to_token_pool 中申请行索引;计算 new_slots_count,从 token_to_kv_pool 中拨款申请新的物理 Slot;随后更新 req_to_token_pool,将匹配到的已有 Slot 与新申请的 Slot 拼接成该 Request 的专属槽位序列。
【 req_to_token_pool 在 slot 申请完之后就更新了,那 radix cache 多久被更新呢?】
3. Pre Schedule Decode (running_batch → cur_batch)
update_running_batch:返回已经输出 EOS 的 Request 或者已经输出 Length Limit 的 Request。将上一轮完成 Prefill 的 last_batch正式并入 running_batch。
retract_decode:如果 GPU 显存池(KV Pool)剩余槽位不足以支撑当前所有请求产生下一个 token,调度器会强制撤回部分请求(通常是最近最少处理的),将其 KV 释放并重新打回 waiting_queue,准备在之后被重新 prefill。
ScheduleBatch::prepare_for_decode():在token_to_kv_pool 中申请新的物理 Slot,并更新 req_to_token_pool 中的索引。注意,不同于 Prefill 的大块分配,Decode 每次只分配 bs * 1 个新的物理 Slot(alloc_token_slots(bs * 1))。
07 Compute Batch & Sample
GPU 执行 Forward,得到 logits 后进入采样,得到 next_token_ids:
next_token_ids = self.sampler(
logits_output,
forward_batch.sampling_info,
# Prefill 采样位置是序列末尾 (seq_lens - 1)
# Decode 采样位置就是当前的 positions
indices = (forward_batch.positions if is_decode else forward_batch.seq_lens - 1),
...
)08 Post Schedule
1. result.copy_done.synchronize():同步等待,确保 CPU 读到的 next_token_ids 是准确传输完成的数据。
2. req.output_ids.append(next_token_id):将 next_token_id 追加到 req.output_ids。
3. tree_cache.cache_unfinished_req(req):更新 LRU 时间戳并锁定路径。
4. tree_cache.cache_finished_req(req):该 request 的 radix cache 节点引用计数减一,确保后续可以被释放。
5. stream_output():将结果推送给客户端。
6. cache_unfinished_req(req):更新 Radix Cache (L1 Cache)的节点,确保后续可以被其他请求共享。
注意到,token_to_kv_pool (L3 Cache)和 req_to_token_pool (L2 Cache)的更新是在 Pre Schedule 阶段完成的,而 Radix Cache 的更新是在 Post Schedule 阶段完成的。如果在 Pre Schedule 就插入 Radix Cache,其他并发请求可能会命中这个正在计算中的前缀。只有等到计算完成(或者至少在 process_batch_result 里),我们才能确信这部分 KV 已经写入显存,可以安全地被其他请求共享。
09 Overlap Scheduler:将调度开销隐藏在算子之后
Normal Scheduler 的工作流中,CPU 调度和 GPU 计算是串行的。然而,这种阻塞式的模式下,CPU 调度效率严重影响着整个系统性能的上限,倘若单步 Decode 仅需几毫秒,则 CPU 准备工作产生的微小延迟都会被放大为显著的 bubble。通过 profiling,我们进一步发现,CPU 侧运行核心调度算法(如优先级排序)的开销其实很小,真正的开销大头在于 Python 侧繁重的输入输出处理:
1. Pre Schedule: 构建复杂的输入张量、准备采样元数据(Sampling Info)、分发请求元数据。
2. Post Schedule: 执行输出的去标记化(Detokenization)、检查结束条件(EOS/Length)。
对于这种情况,我们有两个思路,一种是降低 CPU 调度的频率(减少调度次数),另一种是异步掩盖(将 CPU 的调度开销掩盖在 GPU 计算之内),这分别对应着两种技术流派,Multi-step Scheduling 与 Overlap Scheduling。为了解释清楚这两种技术流派,我们来分析一个细节,采样得到的 token 实际上是在哪一步进行的,换句话说,为什么 Sample 阶段其实是在 GPU 进行的?
乍一想,采样似乎不是一个简单的矩阵乘法运算,GPU 上的计算效率似乎不高。但是 logits 传输到 CPU 上再进行采样,会产生庞大的传输开销。假设 Batch Size 是 256,模型的词表大小(Vocabulary Size)是 128,000(Llama-3 的标准)。每一轮生成的 Logits 矩阵大小是 [256, 128000],如果是 bf16(2 字节),那么一轮的数据量就是 256×128,000×2≈65 MB。如果在 CPU 上采样,必须在每一个 decode step 都通过 PCIe 把这 65 MB 的数据从 GPU 搬运到 CPU。虽然 PCIe 4.0 很快,但每秒搬运几百次 65 MB 产生的时间开销(Latency),可能比模型推理本身还要长。反过来,选择在 GPU 上采样,只需要运行一个极小的 Kernel(比如 Argmax 或者 Top-P 采样),从 128,000 个数里挑出 1 个 Token ID。传回给 CPU 的数据仅仅是 batch size 个整数(Token IDs),大小不到 1 KB。考虑到这层后,在传统的推理框架中,采样实质上发生在 GPU 上。但 CPU 依然要等待采样结果回传(Synchronize),拿到了 Token ID 才能进行下一轮调度,这就是 Normal Scheduler 的做法。
有了采样事件的认知后,我们总结下 Scheduling 的四种事件和对应的计算位置:
事件 | 计算位置 |
|---|---|
Pre Schedule | CPU Heavy |
Compute Batch | GPU Heavy |
Sample | GPU Heavy |
Post Schedule | CPU Heavy |
10 Multi-step Scheduling vs. Overlap Scheduling
1. Multi-step Scheduling
在 normal scheduler 中,每一轮生成 Token 都要负担一轮 Python 的调度成本,能否降低 CPU 调度的频率,比如生成多轮 token,再进行一次 CPU 调度?这就是 multi-step scheduling 的核心思想:Amortize(摊薄)。CPU 不再每生成一个 Token 就介入一次,而是一次性给 GPU 下达一个多轮指令,譬如当前 Batch 请连续跑 5 个步(Steps),再返回给 CPU,进行一次调度。具体而言,在 CPU 不介入的情况下,GPU 内部会运行一个固化的循环 Kernel,每一轮推理(Forward)结束后,GPU 直接在显存(VRAM)中进行采样,并将得到的 Token ID 直接填入下一轮的输入 Buffer。在这多步运行期间,生成的 Token 完全不回传给 Python。
这种 amortize 的策略虽然摊薄了 CPU 开销,却牺牲了推理系统的灵活性。首先,EOS 响应滞后;如果某个请求在第 2 步就输出了结束符(EOS),由于 CPU 正在“休眠”,GPU 会毫无察觉地继续跑完剩下的 3 步,造成显存和算力的空转。其次,无法满足调度调整,高优先级的请求(Preemption)必须等待整个 Multi-step 周期结束才能被加入队列。
2. Overlap Scheduling
与之相对的另一种调度优化方法是 Overlap Scheduling,它并不试图减少调度的频率,依然坚持单步调度,而是通过一种极其巧妙的重叠机制,把 CPU 的开销彻底隐藏在 GPU 的计算之内。但是,自回归推理中,第N+1步必须依赖第N步的输出 Token。如果 CPU 不等 GPU 采样完就去调度下一轮,它根本不知道输入 Token 是多少。
SGLang 引入了 FutureMap 机制,实现了一种预填充策略:
1. CPU 侧:符号化链接(Symbolic Linking):当 CPU 准备 Batch N 的推理指令时,它会预先在 GPU 的 FutureMap 中预留(Reserve)一组物理槽位。尽管 Batch N 还没结束,CPU 已经知道 Batch N 产生的 Token,肯定会被分配到 FutureMap 的 X 号槽位。在 CPU 准备 Batch N+1 的输入张量时,通过符号引用,将 X 号槽位的地址直接填入 N+1 的输入位置。CPU 在数值尚未产生时,就已经在逻辑上完成了 Batch N (Output) -> Batch N+1 (Input) 的拓扑链接。
2. GPU 侧:延迟解析(Lazy Resolution):Batch N+1 的指令被发射到 forward_stream。在它启动真正的推理算子前,会先跑一个极小的 Resolve Kernel。由于 forward_stream 是顺序执行(FIFO)的,Batch N 的采样算子(Sample)必然已经先于 N+1 完成了填充动作——即把真实的 Token ID 写入了 FutureMap 的第 X 号槽位。Resolve Kernel 此时只需根据索引,从显存的 FutureMap[X] 位置读出真实值,原地替换输入张量。
3. 通过这种预先链接的机制,CPU 可以在完全不触碰真实数据、不进行跨设备同步的前提下,不断向 GPU 发射后续的计算指令,从而实现 Overlap Scheduling。
分析完了原理,我们能够见到,当多个 batch 形成流水线时,我们可以用 GPU 的 Compute N+1 和 Sample N+1,去重叠上一个批次的 Post Schedule N 和当前批次的 Pre Schedule N+1。Overlap Scheduling 的调度策略仍旧是灵活的,支持细粒度的资源控制,支持完善的 EOS 响应,支持抢占。当然,代价是实现复杂,需要使用 CUDA Stream 和 Future 映射管理。
11 Overlap 事件循环
经过所有的铺垫,我们最后看看在 scheduler.py 中,event_loop_overlap 是如何通过精心安排的指令发射顺序,保证 CPU 和 GPU 的最大并行的:
def event_loop_overlap(self):
self.result_queue = deque() # 存储 (batch, result)
while True:
# 1. Pre Schedule (Batch N+1)
recv_reqs = self.recv_requests()
self.process_input_requests(recv_reqs)
batch = self.get_next_batch_to_run()
if batch:
# 2. Launch Compute Batch (Batch N+1) -> 非阻塞提交
batch_result = self.run_batch(batch)
self.result_queue.append((batch.copy(), batch_result))
# 3. Post Schedule (Batch N)
# 真正实现 CPU (Post-Schedule N) 与 GPU (Compute N+1) 的并行
if self.last_batch:
tmp_batch, tmp_result = self.result_queue.popleft()
# 同步等待 CPU 数据就绪,但不影响 GPU 正在跑的 Compute N+1
self.process_batch_result(tmp_batch, tmp_result)
# 4. Launch Sample (Batch N+1)
# 在 Post-Schedule N 之后执行,确保了 N+1 依赖的 vocab mask 已更新
self.launch_batch_sample_if_needed(batch_result)
self.last_batch = batch









