绑定手机号
确认绑定









作者:attack204
地址:https://zhuanlan.zhihu.com/p/2007250216227729670
经授权发布,如需转载请联系原作者
趁着春节有空,自己调研了一些目前Agentic RL场景下对Infra的一些需求,主要内容都来自于各家大厂的文章
值得一提的是除了最后一篇Seer的文章外,其他3篇都是春节期间发布的,LLM还是太卷了(
01 Minimax-ForgeRL
原文为:Forge: 大规模原生Agent RL系统
https://zhuanlan.zhihu.com/p/2005742716252861435
1. Agent框架实现
首先是将Agent独立出一个单独的Server模块,这是一个比较直观的抽象
原来的数据流为
RLFramework(Verl/Slime) -> RolloutEngine=> [AsyncBuffer] -> Trainer
加一个中间层变为
RLFramework(Verl/Slime) -> [AgentServer <-> RolloutEngine]=> [AsyncBuffer] -> Trainer整体架构是这样的
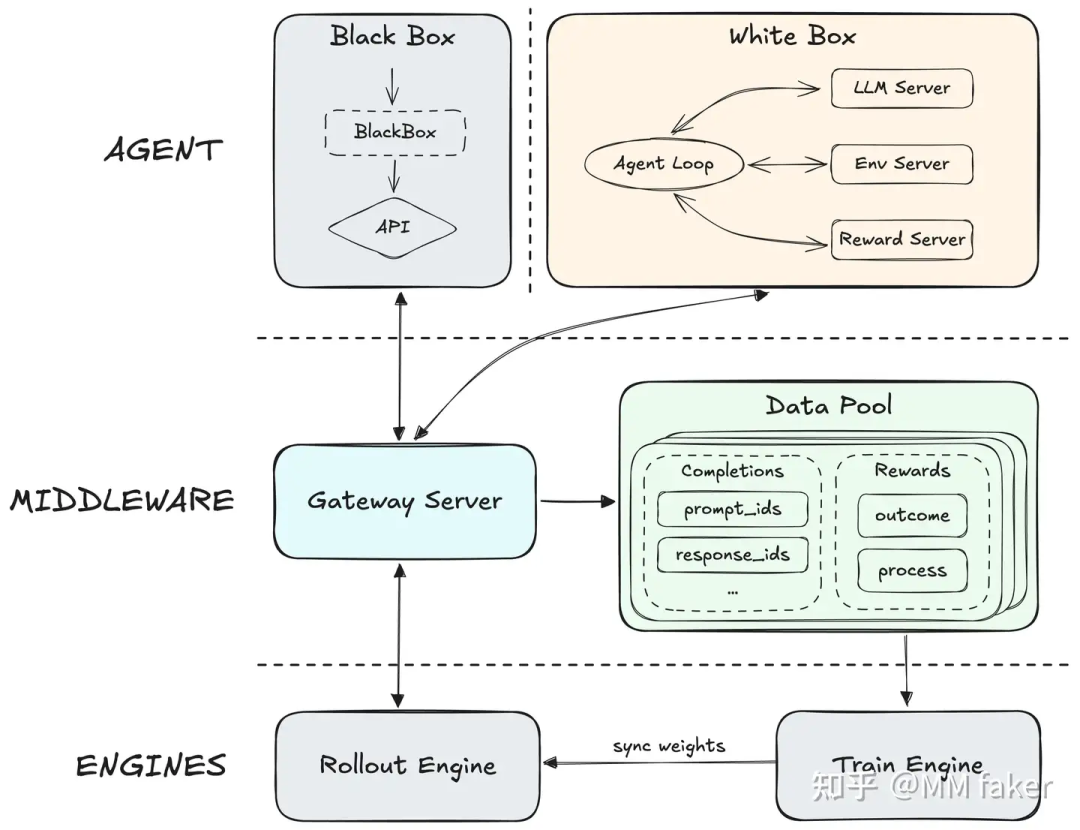
而对于AgentServer实际上又有两种情况
1. 黑盒Agent:比如如果想要专门训练ClaudeCode + LLM的表现,那么在AgentServer中的sandbox中起一个ClaudeCode,ClaudeCode和RolloutEngine不断交互产生trajectory,然后丢到AsyncBuffer里面,后面就是正常RL的流程: 计算Reward -> 计算优势函数 -> 计算Loss
2. 白盒Agent:这一部分一开始读的一头雾水,于是在v上请教了一下岳老师背景知识
首先在multi-turns场景下,对于context过长的情况一定需要一些手段来清除掉一些上下文 (Context Management)
比如在DeepSeek V32技术报告中提到的对于thinking模型的做法是一旦当用户消息到达时,会清除掉Thinking 的内容避免上下文过长。
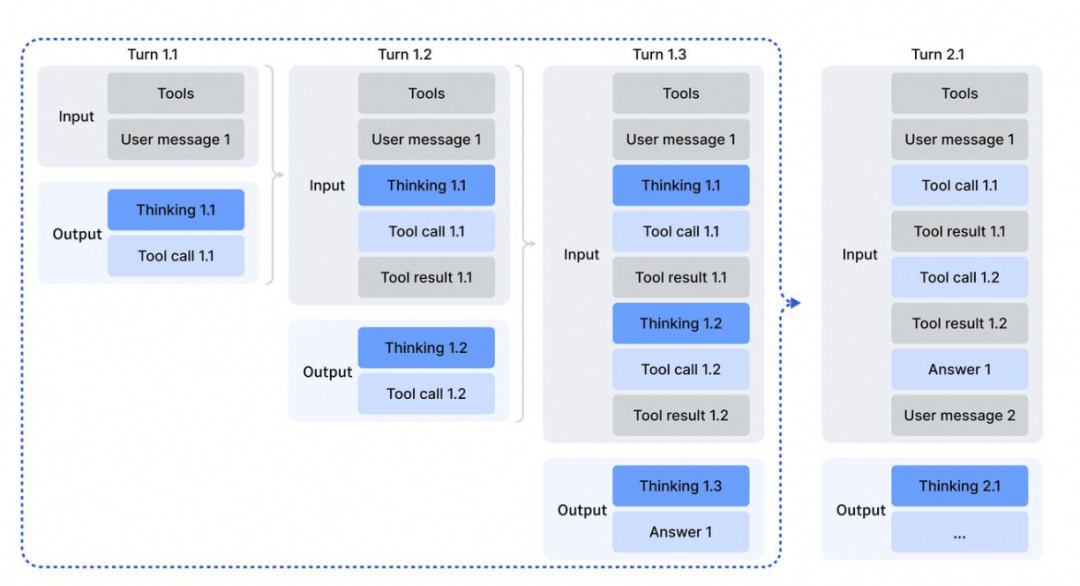
而对于SearchAgent(例如BrowseComp),目前几家(ClaudeCode opus4.5 / DS v32 / Kimi K2.5 / GLM 5)都是采用了discard-all策略:即token阈值超过80%时 reset掉整个上下文窗口,ClaudeCode给出的API大概长这样
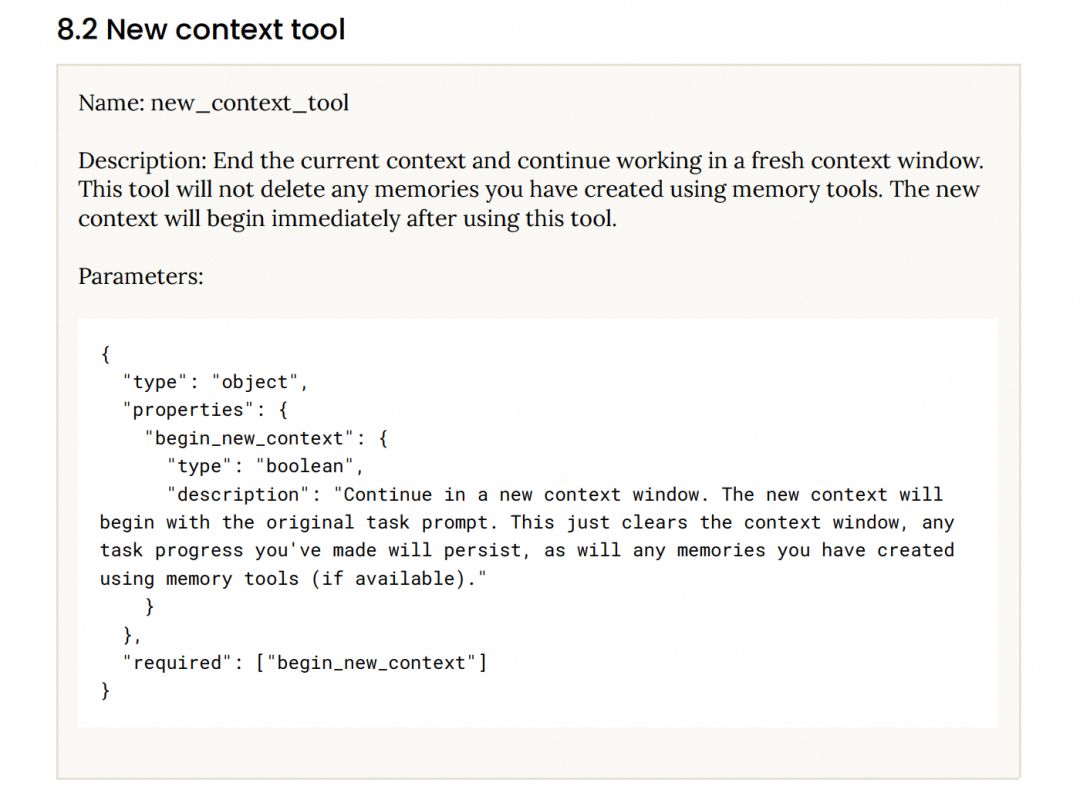
在ForgeRL中会将 Context Management 建模为 agent action,显式的在训练中告知模型上下文的变化情况,从而让模型在训练阶段就能感知到CM的变化,进而在CM变化时更加关注 State-critical Token .
2. RL调度策略
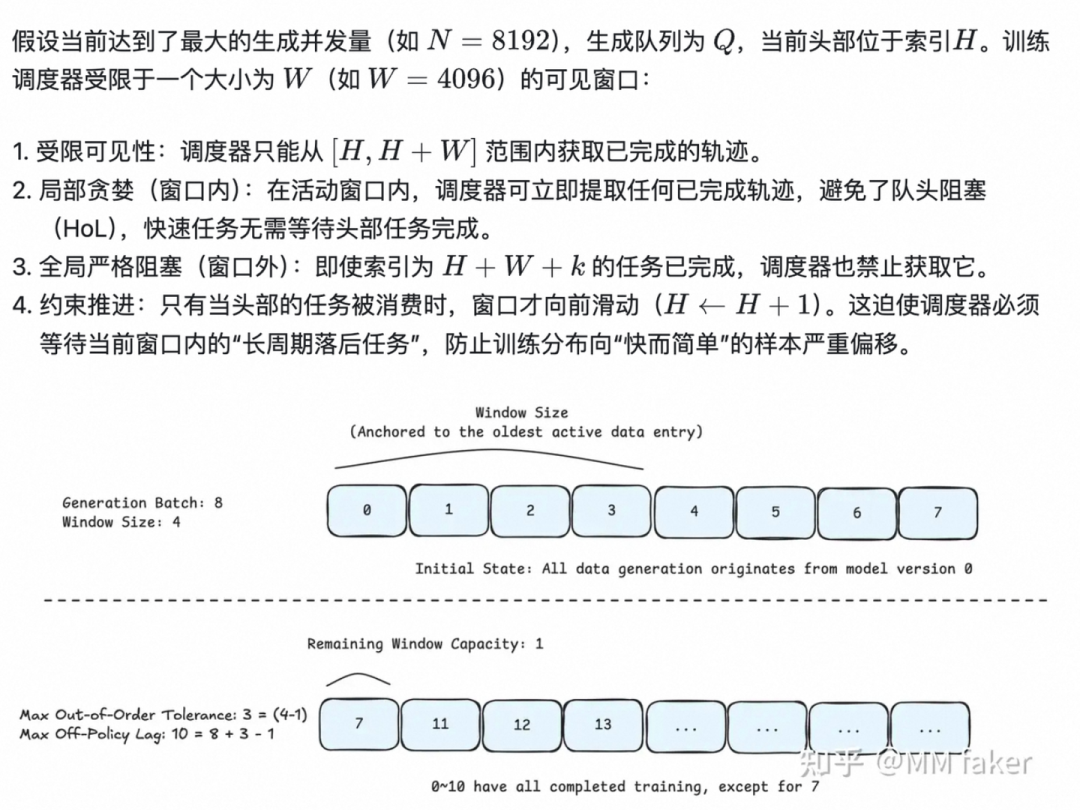
目前主流的RL框架基本都是异步实现,因此一定会产生off-policyness的问题,这里的 trade off 在于:
1. 如果只取最新鲜的数据来进行训练,而对于旧版本的数据直接丢弃,那么会导致训练的样本更多的是 "快而简单"的样本 ;
2. 如果只取最旧的数据来进行训练,由于Rollout的长尾效应,会导致系统吞度量下降。
但是具体到调度策略的设计也是一个没有银弹的事情,ForgeRL提出的是一种基于滑动窗口的算法:在窗口内可以任意取trajectory进行训练,但必须等待窗口内的旧数据完成后才会推进窗口。
具体的算法如下,原文讲的比较详细
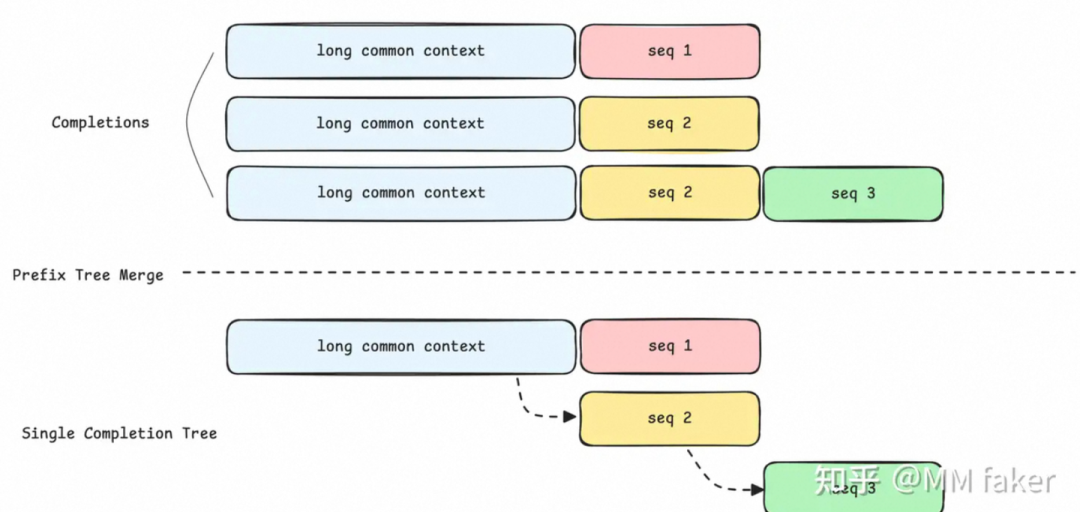
3. Prefix Tree Merging
对于Group-Based RL (例如GRPO) 的一大特点是对于一个Prompt,会生成n个Completions (例如20个),这些Completions大多有相同的前缀,在推理时可以借助SGLang PrefixCache的能力来尽可能的复用KVCache
而这项工作的核心是在Megatron训练时也用上前缀的方式,具体的实现是先将Completions组织成树的形式,然后借助MagiAttention来进行实现,实际上MagiAttention本身是为了做CP并行设计的,但是其提供了AttentionMask的语义 (也就是说可以控制每个seq的可见范围)从而来实现TreeAttention的计算
蚂蚁AReal团队也提了一种类似的TreeAttention的方案,使用DFS来算Attention,详细可见论文:AREAL-DTA: Dynamic Tree Attention for Efficient Reinforcement Learning of Large Language Models
4. 推理加速
这一部分原文写的很清楚,索性直接摘抄过来
对于Dynamic MTP,这块之前和MMX合作搞了一些,比较了解,目前最新的进展是说对于多层MTP,实际上现有的Eagle算法并不能直接支持,而是要采用一种叫做Vanilla的变种算法,这一块在SGLang中由liangsheng大佬做了实现 #15207,但是目前是每一层MTP单独跑了一个cuda graph,这里可以优化为多层MTP fuse 到一个cuda graph,这块阿里云的同学在帮忙支持,估计年后不久会有PR。
Dynamic MTP:首先我们引入 MTP 进行推理加速,同时为了保证训练过程中维持 draft model 的高接受率,我们通过 Top-K KL Loss 在 RL 过程中持续训练 detached MTP Head,与 RL policy 保持对齐。 Rollout 侧的 PD 分离:PD 分离可以消除 MoE 调度中的 PD 干扰,为每个实例提供独立的并行和生成策略,在最大化吞吐量的同时优化长尾样本的延迟,防止极端样本阻塞 FIFO scheduler,并带来较高的 offpolicy。 全局 L3 KV Cache Pool:在多轮和超长上下文的 agent 场景下,请求间拥有极高的共享前缀比例,但是局部的 kv cache 受容量限制,无法达到满意的 prefix cache 命中率,甚至在 RL batch size 极大的情况下,会发生大量由于驱逐导致的重计算,因此需要支持全局的 L3 KV cache。同时,Forge 还通过 scheduler cost-aware 的调度机制,权衡排队延迟和缓存传输时间来动态路由请求,在不使实例超载的前提下最大化缓存局部性。
5. 复杂Reward函数
由于Agentic RL基本都是multi-turns的调用,因此只对最终结果做奖励(Sparse Reward)容易让模型养成偷工减料的习惯,因此需要设计一种dense reward机制来对每一轮的调用都进行打分
这块对于infra来说倒没什么难的,大概只需要在RewardServer中实现一个新的类就可以,但是在算法侧怎么设计可能比较讲究。
mmx的原文如下,讲的也比较直白
为了解决超长轨迹的信用分配问题并确保稳定,我们设计了一个由三部分组成的复合奖励
1. 过程奖励(Process Reward):监督 agent 的中间行为(如惩罚语言混合或特定工具调用错误),提供密集反馈,而不只依赖最终结果。
2. 任务完成时间奖励:将相对完成时间作为奖励信号。因为真实延迟不仅取决于 Token 生成,还受工具执行和子 Agent 调用影响,这能激励 Agent 主动利用并行策略、选择最短的执行路径来加速任务。
3. 用于降低方差的后续奖励(Reward-to-Go):长周期任务的稀疏奖励容易引发高梯度方差。我们使用 Reward-to-Go 来标准化回报,大幅提高了信用分配的精度,稳定了优化过程。
02 ROLL
原文为:苦涩的教训!ROLL团队分享:Agentic RL 训练中的实践经验
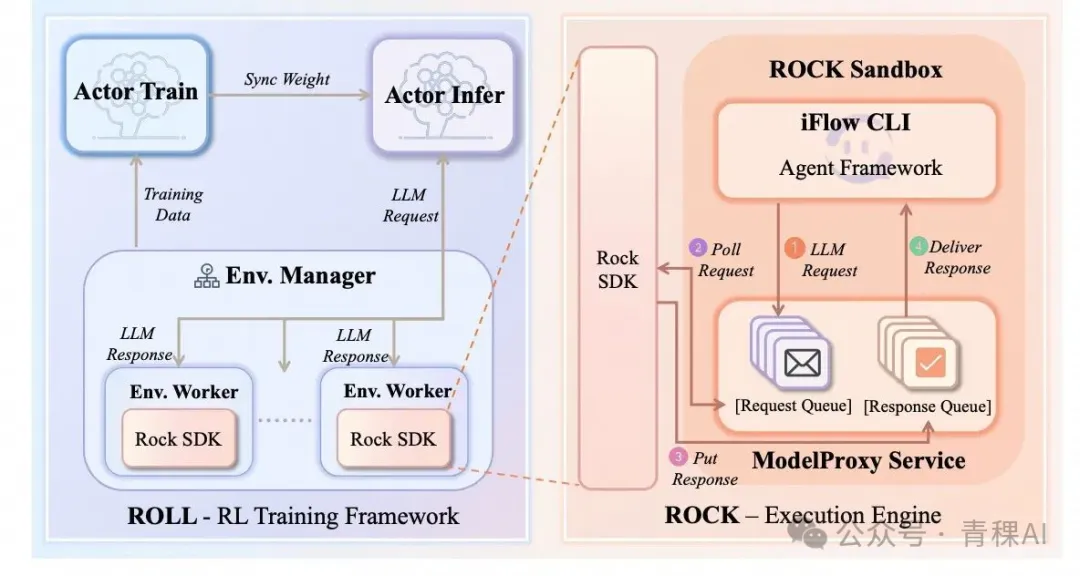
1. Agent环境实现
和ForgeRL类似,Roll框架也实现了单独的AgentServer:即采用Rock作为Sandbox,启动内置了iFlow Cli作为Agent实现与模型的交互
2. Agent环境处理
在Agentic RL训练时,由于Agent经常会留下中间产物 (例如 临时文件),这些临时产物可能会间接的提示模型,因此需要对严格环境进行管理,否则会导致模型经常"偷懒",甚至会直接读取或修改测试脚本 (例如在观测结果中看到测试脚本调用次数显著上升)
(1) 防止资源泄露与污染,Roll进行严格的环境清理:
在 rollout 前主动清理环境初始化或 Agent 安装过程中产生的中间文件
测试文件仅在最终评估阶段上传,与训练阶段严格隔离。
(2)在环境中主动引入多样性
不同版本的软件包;
不同镜像源;
不同的环境配置细节。
(3) 需要有意扰动甚至部分破坏环境:例如移除某个预装依赖或切换到不可用的镜像源头
3. 训练数据处理
这部分说的是数据处理的问题,即Roll团队发现有大量的测试数据存在false positive(伪阳性)的问题:要么数据不完整,要么就是本身就是个错误数据
因此在洗数据的时候就引入了一个LLM-as-judge验证模块,让多个LML审查每一组测试数据,只有对于通过验证的实例才会进入RL训练池
具体来说会做两种检查
1. Ground-truth 验证:如果golden solution无法通过全部测试,则丢弃该实例。
2. No-op 验证:如果在不执行任何有效操作的情况下也能通过测试,则丢弃该实例。
4. Chunked MDP
对于GRPO,其是在Token Level做重要性采样,对于GSPO是在Sequence级别
这里提了一个 Chunked MDP,即将一次环境交互到下一次环境交互之间的连续片段叫做 Chunk,在Chunk级别计算Reward和重要性采样
03 ThunderAgent
原文:ThunderAgent: A Simple, Fast and Program-Aware Agentic Inference System
春节期间看到Kang Hao gg在各大群里宣发自己的工作,同时自己正好在关注这部分,索性来拜读一番
ThunderAgent解决问题的思路非常直观:遇事不决加一层,ThunderAgent就是在AgentServer与RolloutEngine之间加了一个代理层
1. program Abstraction
对于目前AgentServer与Rollout,基本上都是每轮的交互看作是独立的推理任务,这样的坏处是无法实时追踪每个Agent任务的实时状态(例如已经用了多少Token)
例如:一个编码智能体(SWE-Agent)正在修复 GitHub 上的 Bug,其交互流程大概如下
传统请求感知系统(SGLang):
┌─────────────────────────────────────────────────────┐
│ Step 1: 推理请求 ──→ vLLM(无状态,独立处理) │
│ Step 2: 工具执行(编译器)──→ Kubernetes(无状态) │
│ Step 3: 推理请求 ──→ vLLM(不知道Step1的存在) │
│ Step 4: 工具执行(测试器)──→ Kubernetes(不知道历史)│
└─────────────────────────────────────────────────────┘而引入独立的ThunerAgent层后,就可以完成对Agent任务抽象的流程管理,例如
┌─────────────────────────────────────────────────────┐
│ P= ⟨ID="bug_fix_001", │
│ c=15000 tokens, ← KV缓存占用 │
│ T={Docker, Bash}, ← 工具资源 │
│ L=backend_2, ← 绑定GPU节点 │
│ τ=Reasoning, ← 当前推理阶段 │
│ s=Active⟩ ← 调度状态 │
│ │
│ Step 1 → Step 2 → Step 3 → Step 4 │
│ ↑___________同一个程序P持续存在___________↑ │
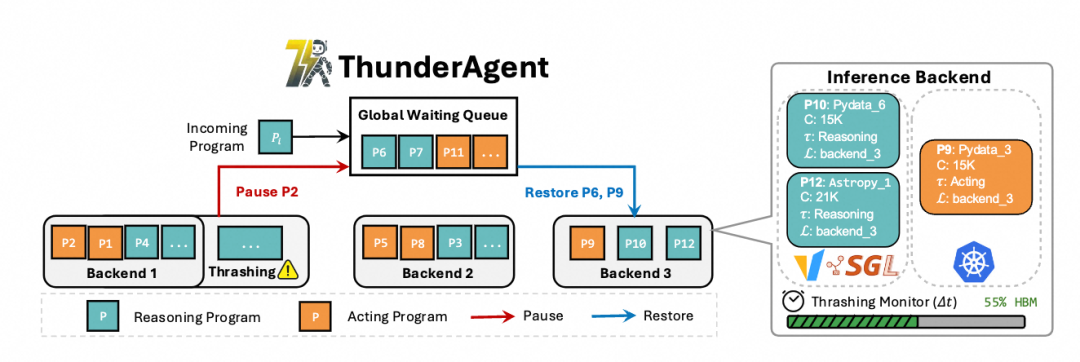
└─────────────────────────────────────────────────────┘2. State-Aware Pausing
这里首先对任务的开销做了建模,这5项分别代表解码、预填充、重新计算、未使用容量和空闲缓存

而系统的优化目标主要主要是减小后3项也就是 、 和 的开销
而对于KVCache接近阈值的情况,由于ThunderAgent可以捕获程序的运行状态,因此引入了两个新的操作
Pause: 暂停一个程序的执行,并释放其KVCache
Restore: 恢复一个程序的执行
有了这两种状态,ThunderAgenet会基于一种周期性检测的方式,当显存水位比较高时会暂停一部分程序的执行,而当显存水位降低时会恢复程序执行
那么到底需要驱逐哪些程序的?这里论文给了一个结论:优先驱逐占KV Cache最小的程序,因为Attention的计算复杂度为 ,而
3. Tool Resource Management
这里要解决的问题是Agent任务运行完成后环境被污染的问题,有两点设计
1. Hook-based garbage collection: 既然能够检测任务的状态,那么就等到任务达到Terminated状态时对环境资源进行清理
2. Asynchronous environment preparation:环境初始化的延迟(例如安装Docker)可能会成为瓶颈,为解决该问题,ThunderAgent监控全局队列,如果发现高优先级的程序接近恢复阈值时就提前Prepare初始化环境。
04 Kimi-Seer
原文为:Seer: Online Context Learning for Fast Synchronous LLM Reinforcement Learning
首先Seer这篇论文的研究场景主要是同步训练下的优化,但是笔者看到的几个RL Case基本上都是跑的异步训练,所以适用性还有待考证
1. Divided Rollout (分段Rollout)
背景:前文中提到,对于GRPO这种Group-Based RL算法,其会对同一个prompt生成n个response,但是常见的调度算法会把n个reponse的生成调度到同一台实例上执行,这样会带来两个问题
由于Rollout的长尾问题严重,因此会造成实例间负载不均衡
单实例间的KVCache爆满触发抢占
因此论文中提出把请求切为Chunk粒度,每一个Chunk 8K长度,下面是GPT老师画的图,比较直观。同时KV Cache需要缓存到Mooncake中,这样迁移时无需重新Prefill
传统方式:
Group → [req1, req2, ..., req8] → 绑定到Instance A,跑完为止
↑
长的拖死短的,无法迁移
Seer的方式:
Group → req1 → chunk1(8K) → chunk2(8K) → chunk3(8K) → ...
↑ ↑ ↑
调度到A 调度到B 调度回A(按负载动态选)2. Context-Aware Scheduling (上下文感知调度)
要解决负载不均衡的问题,本质上还是要知道哪些Request是长尾Request,也就是最好能知道Response的长度,因此有个很直观的想法是对于GRPO任务 <1> 优先选第一条Request作为 speculative request 来优先调度 <2> 调度完成后以speculative request 的长度作为组内response长度的估计 <3> 按照长任务优先的策略调度剩余的请求
大致流程为
阶段1:Length Filtering(长度过滤)
└─ 用SFS(Shortest First)调度所有Speculative Requests
→ 短的很快完成,长的暴露为长尾候选
阶段2:Length Estimation Update(长度估计更新)
└─ Context Manager记录每个Group已完成请求的最大生成长度
→ 作为该Group预期长度的在线估计
阶段3:Approximate LFS调度
└─ 对剩余请求按预测长度降序调度
→ 长任务优先,与短任务并行执行,填满批次3. Adaptive Grouped Speculative Decoding (自适应分组Spec)
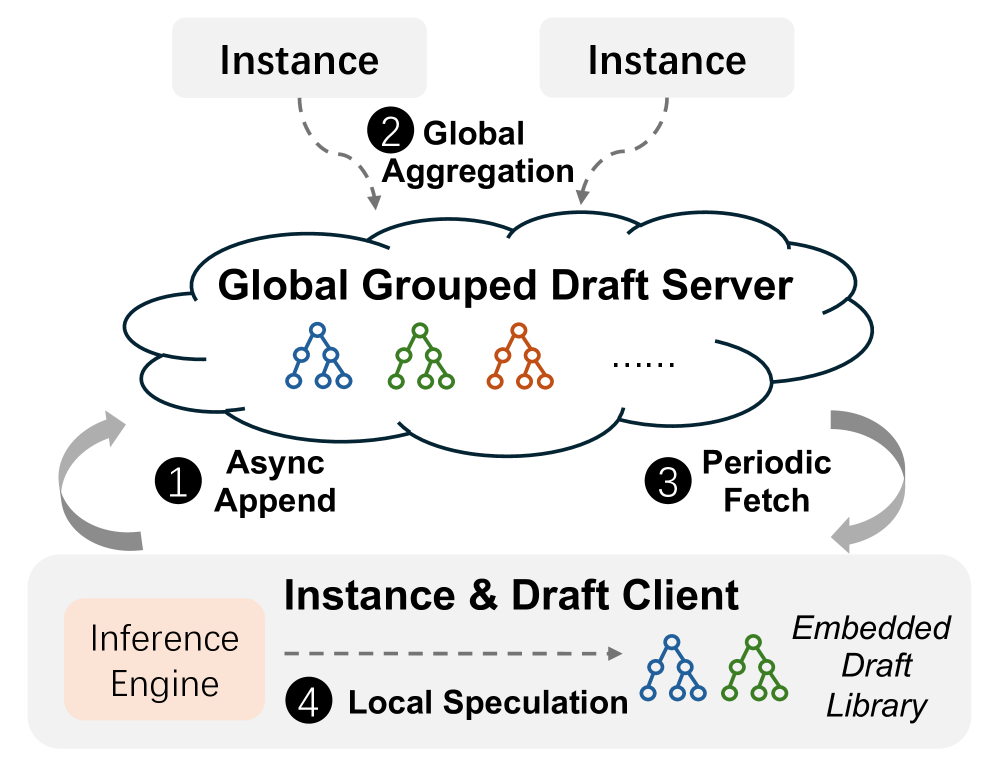
1. 对于采用Draft-Model做Spec的方式,会时常由于RL在Target Model和Draft Model之间的权重更新不同步导致DraftModel的接受率降低
2. 对于传统的N-Gram算法,受限于单机执行,无法充分利用GRPO算法的特点
因此这里提出了一种类似“分布式NGram”的思路,即将不同Group内的Response产生的Token一起丢到一颗分布式的压缩后缀树中
这样能够匹配的信息更多
大致流程为
┌─────────────────────────────────────────────────────────────┐
│ Step 1: 异步Append(各实例独立) │
│ Instance_A 生成了 req_0 的新token: [tok_a, tok_b, tok_c] │
│ Step 2: 全局聚合(DGDS Server端) │
│ │
│ 收到来自不同实例的更新: │
│ G1/req_0: [tok_a, tok_b, tok_c, ...] ─→ ┐ │
│ G1/req_1: [tok_x, tok_y, tok_z, ...] ─→ ├→ Group G1's CST│
│ G1/req_2: [tok_p, tok_q, tok_r, ...] ─→ ┘ │
│ │
│ Step 3: 周期性Fetch(各实例拉取) │
│ Instance_A 只拉取自己正在处理的group的CST │
│ 支持增量同步:只传上次fetch之后的新增内容 │
└────────────────────────────────────────────────────────────┘









