绑定手机号
获取验证码
确认绑定
提问
0/255
提问
订阅开课提醒需关注服务号
×
首页
直播
合辑
专场
智东西
回答成功
知道了
扫码关注智猩猩服务号登录
请使用微信扫描二维码
扫描二维码分享给微信好友
您已订阅成功,有新课程,我们将第一时间提醒您。
知道了
发送提问成功
回答可在
“我的——我的提问”中查看
知道了
失败
欢迎来智东西
登录
免费注册
关注我们
智东西
车东西
芯东西
智猩猩
智东西
车东西
芯东西
智猩猩
智猩猩
智猩猩官网
智猩猩小程序
线下大会
预告
公开课
讲座
专场
自动驾驶
全部干货
激光雷达,揭开面具下隐藏的“丑陋”
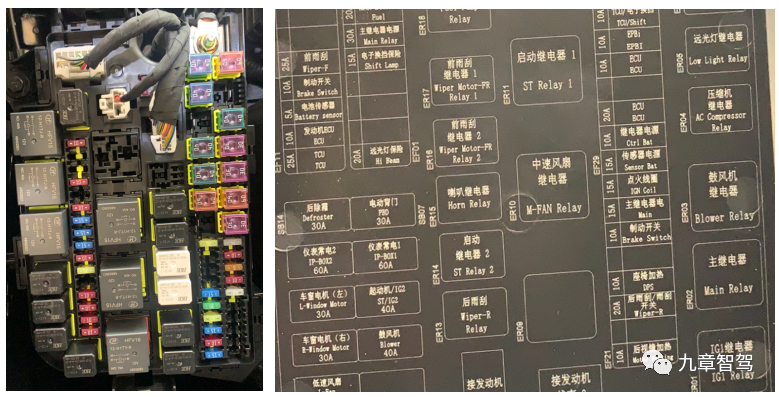
特斯拉为什么要“干掉”保险丝和继电器?
好的自动驾驶AI芯片更是“好用”的芯片 | 地平线高级研发总监凌坤主讲回顾
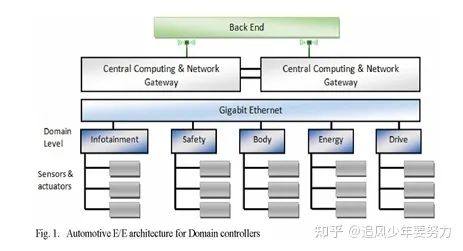
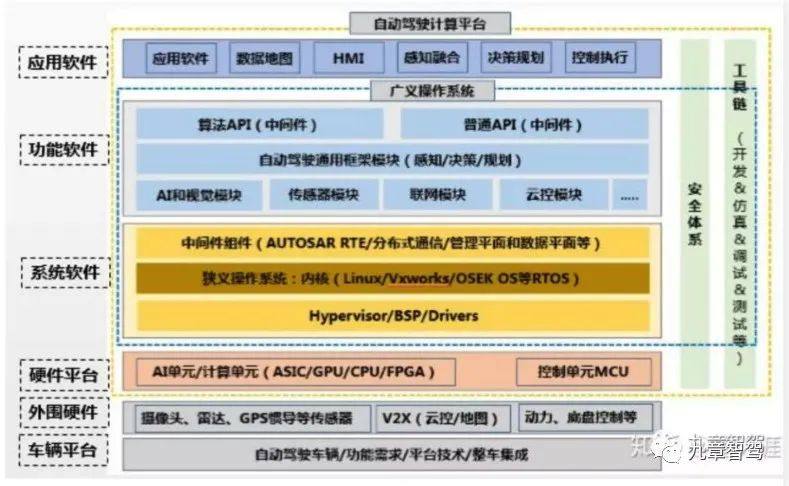
一文解读汽车域控制器集成化架构的背景、优点及设计
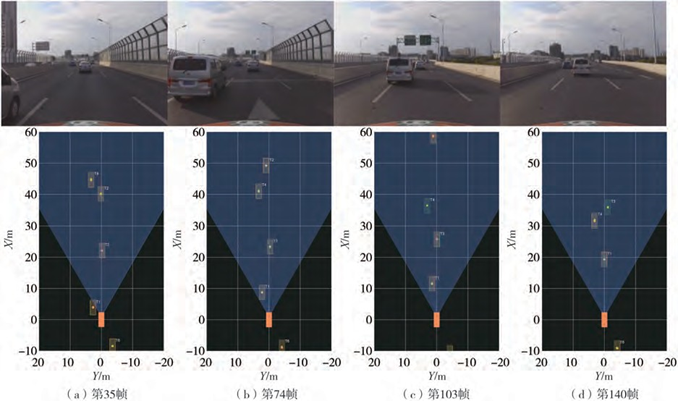
基于激光雷达的3D实时车辆跟踪
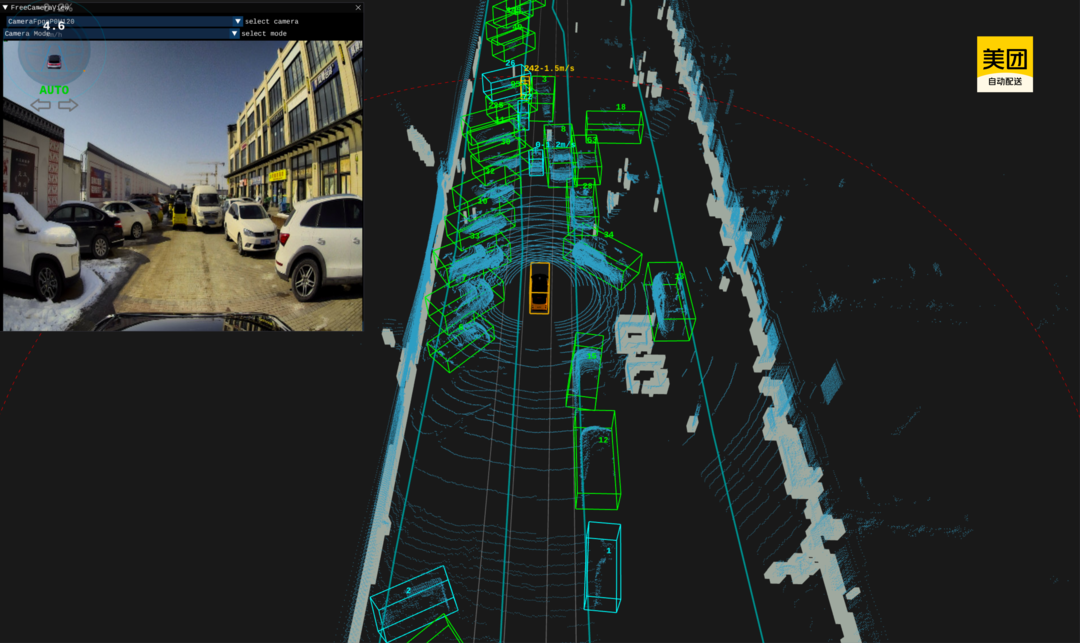
美团技术解读:自动配送感知场景挑战
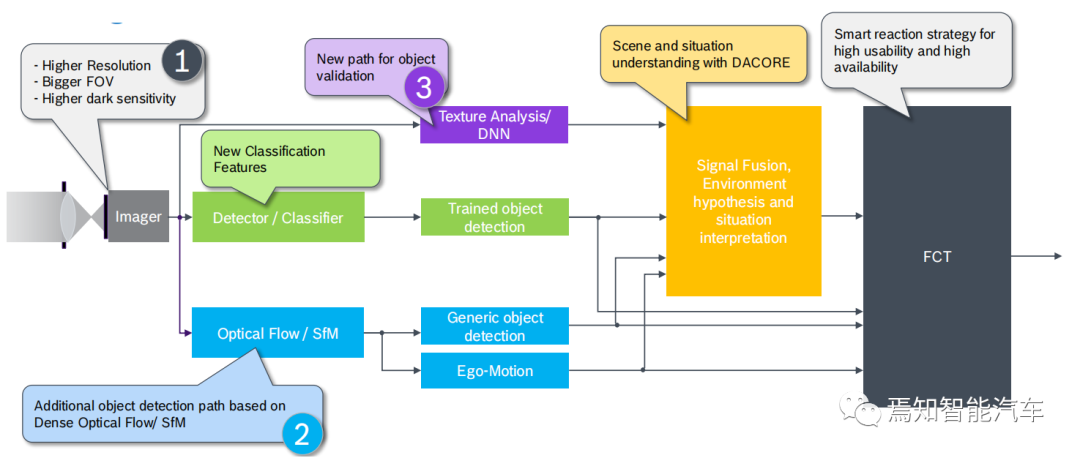
未来自动驾驶必须解决哪些感知问题
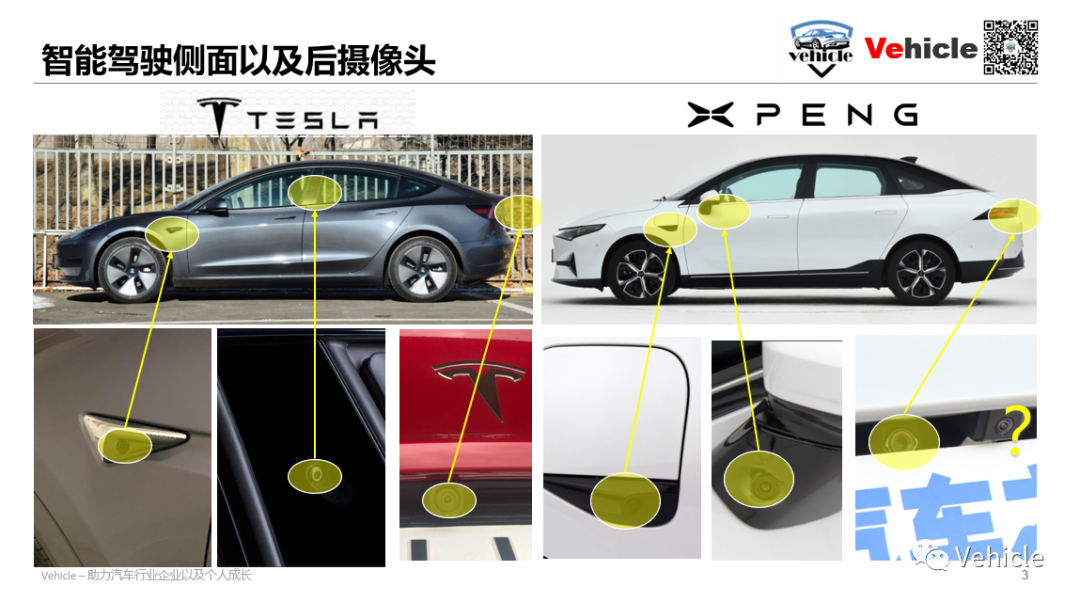
视觉为王-小鹏以及特斯拉的自动驾驶方案
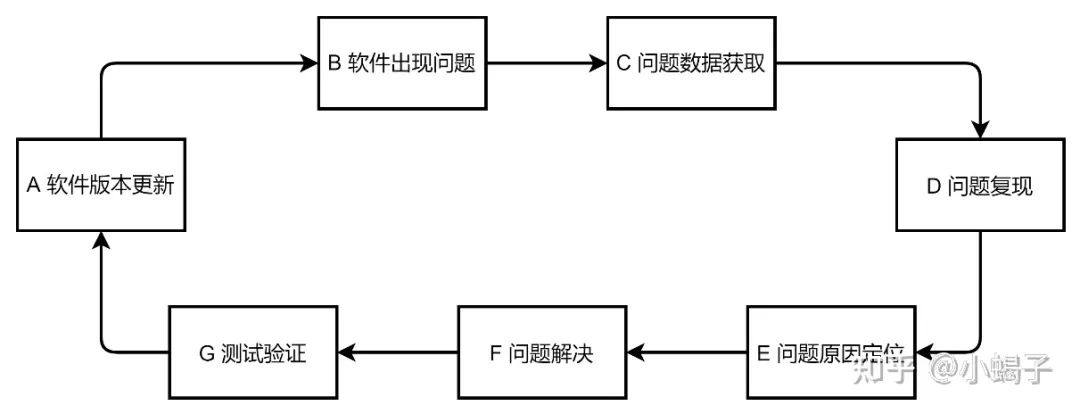
谈谈对自动驾驶感知开发理解
如何正确使用激光雷达
被特斯拉弃用的立体双目路线,为什么丰田、奔驰、华为、小鹏纷纷采用?
解读底盘线控的关键技术
如何翻越自动驾驶AI系统安全高峰 | 地平线系统及人工智能安全总监杨虎主讲回顾
关于智能驾驶域控制器的一些观察
自动驾驶感知开发理解(二):数据标定与算法方案选择
AVP基本原理与关键技术解读
自动驾驶中间件之一:AUTOSAR正在被“边缘化”?
一文读懂线控转向技术
Nvidia自驾平台软件栈浅析-Overview
车载以太网挑战CAN总线
上一页
1
2
3
4
下一页

















 上一页
上一页
